Paper title: MILD: Tractable Terrain Modeling for Learning Improved Bipedal Locomotion on Deformable Surfaces
Video link:
09.2025 Our recent paper on quadrupedal navigation in complex terrains has been reported by IEEE Spectrum.
Report link: IEEE Spectrum
Paper link: Learning Autonomous and Safe Quadruped Traversal of Complex Terrains Using Multi-Layer Elevation Maps
Video link: Youtube
09.2025 Blind locomotion policies have shown its power over challenging terrains. However, they cannot allow robots to traverse through risky terrains that contain wide gaps. Locomotion with environmental perception (active locomotion that uses vision, lidar, or other sensors) can solve such challenges. We propose MARG, a framework that can percept the environment and actively plan the footholds that can avoid falling into gaps.
The work has been accepted by IEEE Transactions on Robotics.
Title: MARG: MAstering Risky Gap Terrains for Legged Robots with Elevation Mapping
Video: Youtube link

09.2025 Reinforcement learning for highly dynamic robotic motions requires complicated design and tuning of reward functions. Imitation learning approaches the problem by mimicing the motion of animals. Many imitation learning frameworks rely on precise motion data that are recorded using motion capture systems, which is costly and time-consuming as it requires professional animal trainers and expensive motion capture devices.
We propose a imitation learning framework that can imitate aggressive motions only from monocular videos. Our framework can reconstruct 3D motions from 2D monocular videos.
The work has been published by Nature Portfolio Journal Robotics (npj robotics).
Title: Learning aggressive animal locomotion skills for quadrupedal robots solely from monocular videos
Video: Youtube

08.2025 How to perform dynamic jumping through constrained space? We propose a hierarchical learning framework: ConsJump. This framework enables quadrupedal robots to automatically transit from walking to jumping over constrained spaces. The robot can dynamically jump through waypoints given by users.
The paper has been published by Advanced Robotics Research.
Title: Learning Highly Dynamic Skills Transition for Quadruped Jumping Through Constrained Space
Video: Youtube

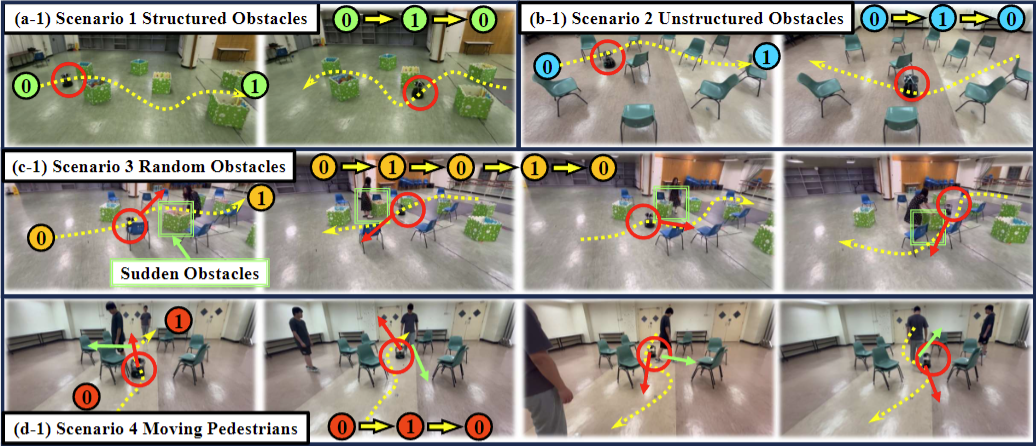
08.2025 How to percept and traverse through different obstacles using one unified policy?
We propose a framework that contains a perception module and a locomotion module. For perception, we propose a multi-layer elevation map which can capture the characteristics of various terrains such as overhangs. For locomotion, our policy can perform different motions in one policy, such as climbing, crawling, and jumping. Finally, our framework can recognize different obstacles and can traverse through them using different skills autonomously.
The paper has been accepted by IEEE Robotics and Automation Letters:
Title: Learning Autonomous and Safe Quadruped Traversal of Complex Terrains Using Multi-Layer Elevation Maps
Video link: Youtube

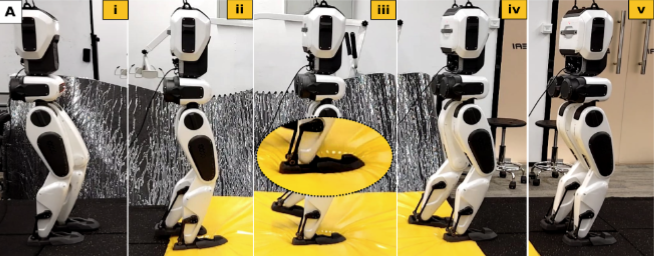
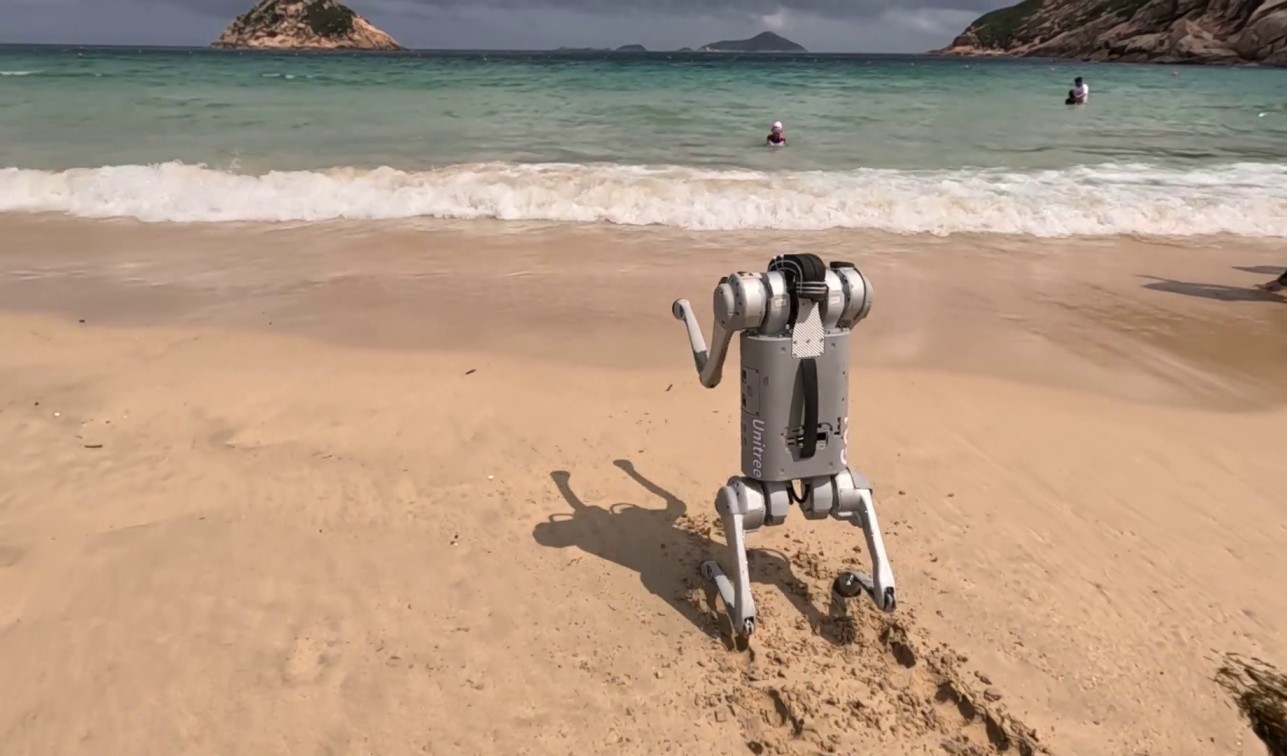
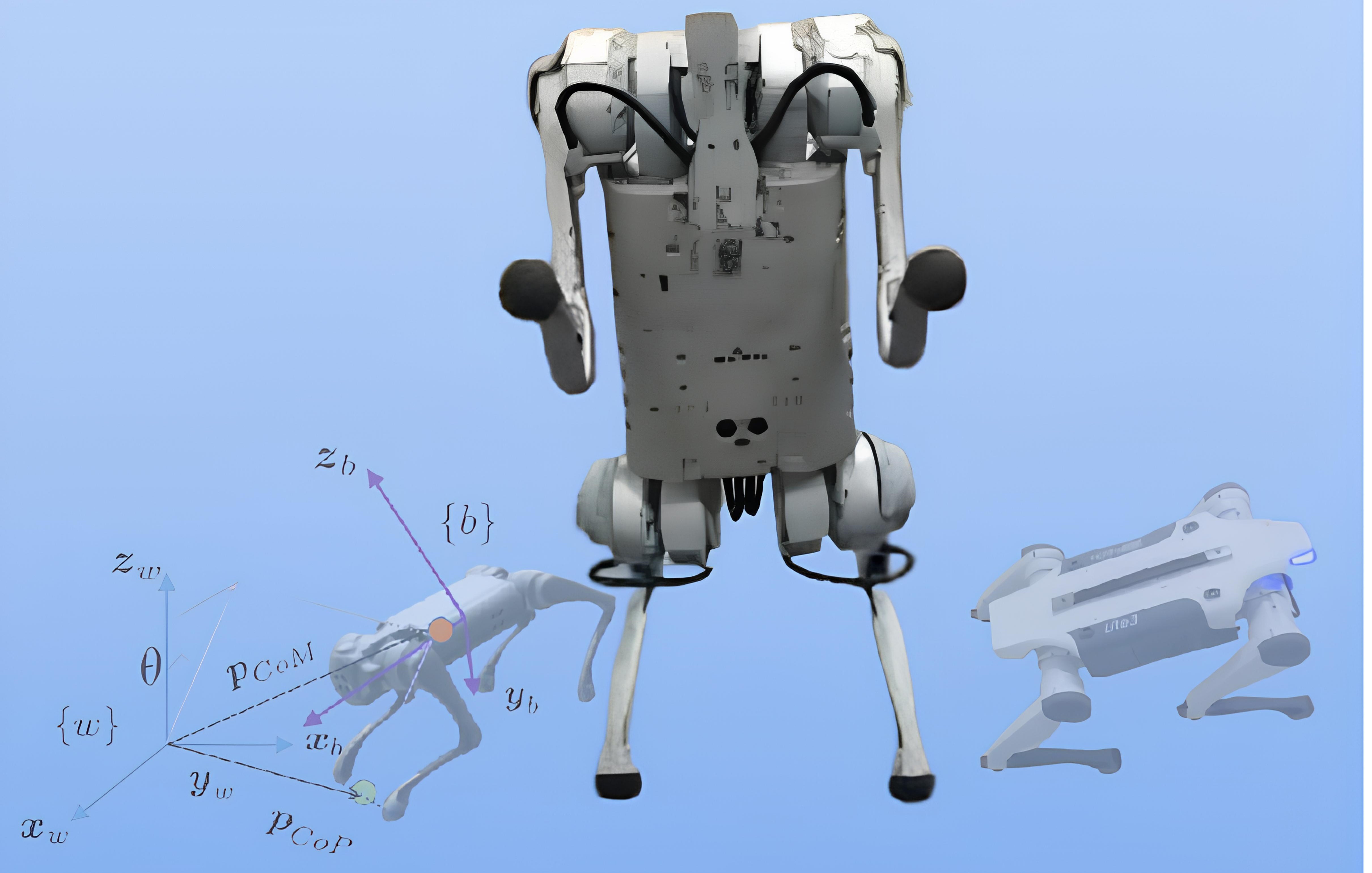
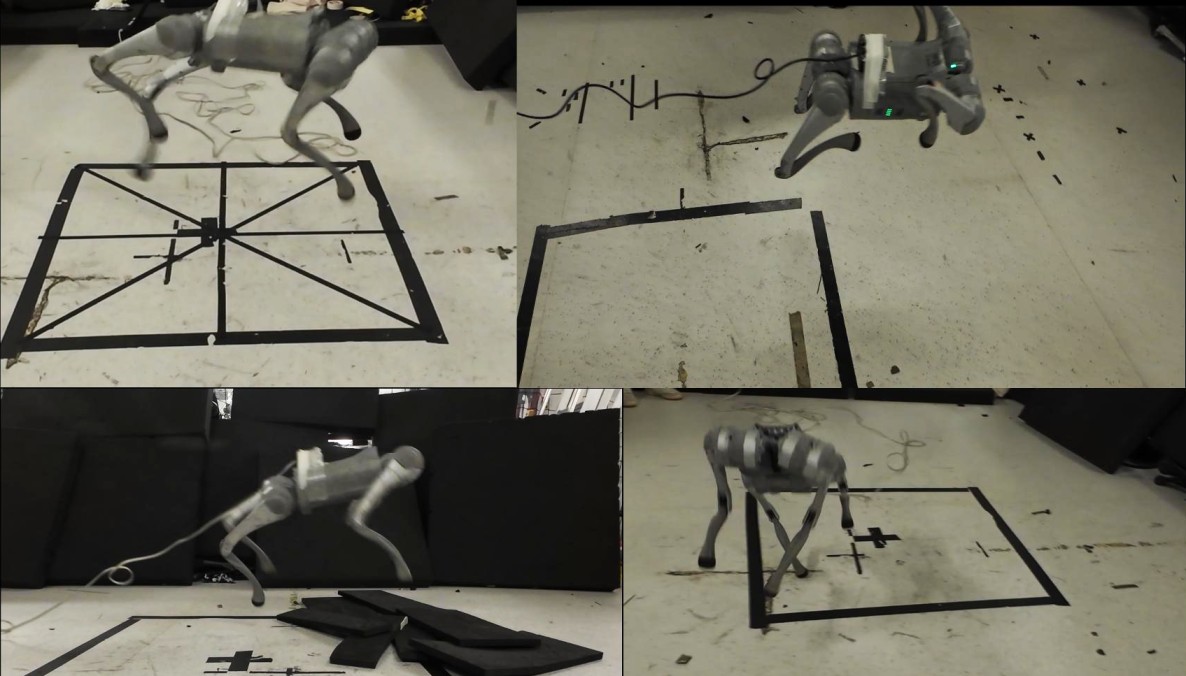
07.2025 Performing bipedal locomotion (not only standing) is extremely difficult for quadrupedal robots cause their feet only have pointwise contact with the surface and their motors are designed for quadrupedal locomotion.
We propose TumblerNet, which can enable quadrupedal robots to perform bipedal locomotion in challenging terrains and in the presence of external disturbances. TumblerNet can also quickly recover its upright position after falling over or being stumbled. Furthermore, it can also perform stable bipedal locomotion in highly soft terrain such as a sandy beach.
The paper has been accepted by Nature Portfolio Journal Robotics (npj robotics).
Paper title: Learning stable bipedal locomotion skills for quadrupedal robots on challenging terrains with automatic fall recovery
PDF Link: https://rdcu.be/eyPz8
Video Link: Youtube
07.2025 How to enhance stability while imitating certain motions? We propose a stable imitation learning framework that can not only enhance stability, but also change the speed of the motion. We demonstrate that the framework can also enable quadrupedal robots to learn bipedal locomotion.
The paper is accepted by Advanced Robotics Research.
Paper title: Stable Imitation of Multi-Gait and Bipedal Motions for Quadrupedal Robots over Uneven Terrains
Video Link: Youtube
06.2025 We have two papers accepted by IROS 2025.
Paper: Like Playing a Video Game: Spatial-Temporal Optimization of Foot Trajectories for Controlled Football Kicking in Bipedal Robots
Video Link: Youtube
Paper: Numerical Optimization-based Kinematics with Pose Tracking Control for Continuum Robots
Video Link: Bili
06.2025 Quadrupedal robots can easily lose control during highly dynamic motions such as jumping.
Our RAL paper proposes a learning framework that enables quadrupedal robots to jump in an omnidirectional fashion.
Paper title: OmniNet: Omnidirectional Jumping Neural Network With Height-Awareness for Quadrupedal Robots
Video Link: Youtube
04.2025 Quadrupedal robots inevitably fall over when walking on extremely steep stairs or challenging terrains.
How to quickly recover its postures without rolling down? Our FR-Net in RAL proposes a solution for this.
Paper title: FR-Net: Learning Robust Quadrupedal Fall Recovery on Challenging Terrains through Mass-Contact Prediction
Video link: Youtube

04.2025 How to search dynamic objects in unknown environments? We propose a time potential map which can estimate the target distribution based on historical search information. The paper is accepted by Robotics and Autonomous Systems.
Paper title: DAPTP: Distributed Awareness Planner using Time Potential for dynamic target search
Video: Youtube
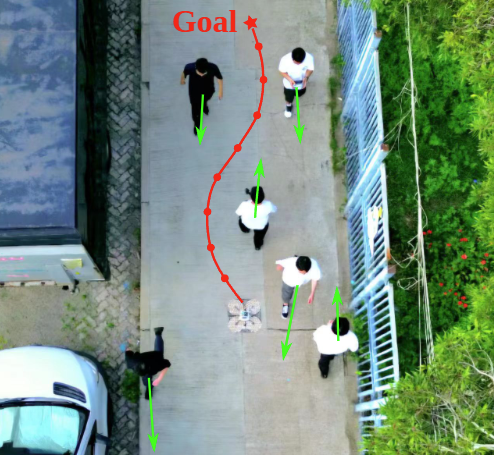
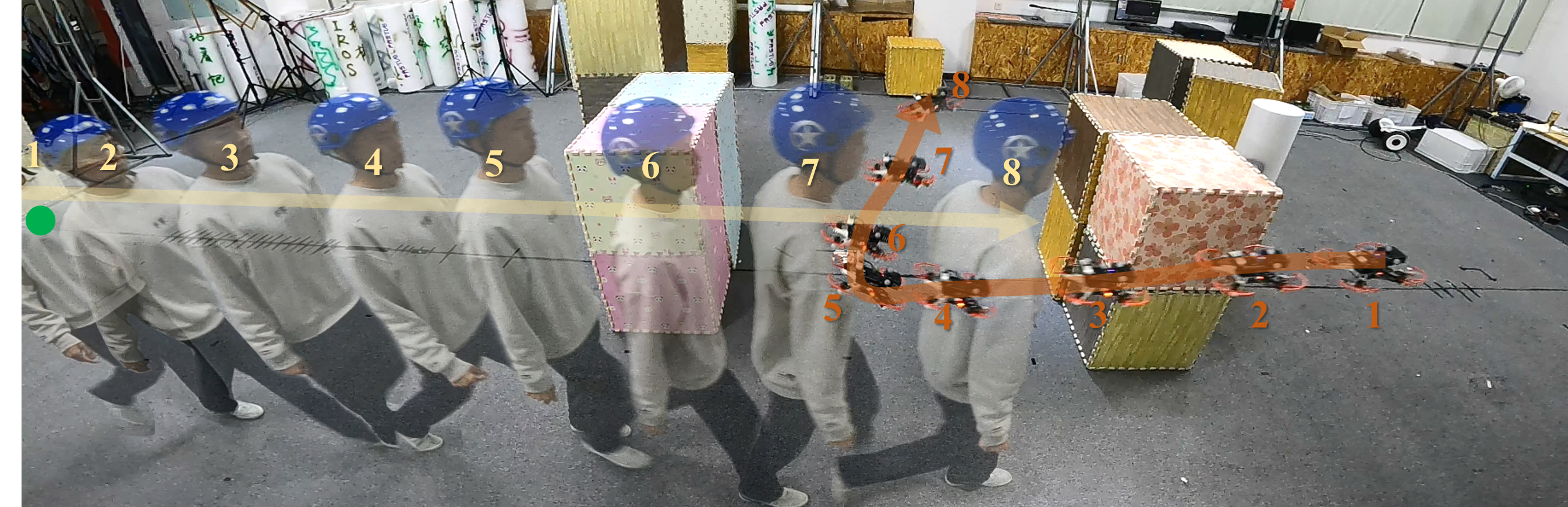
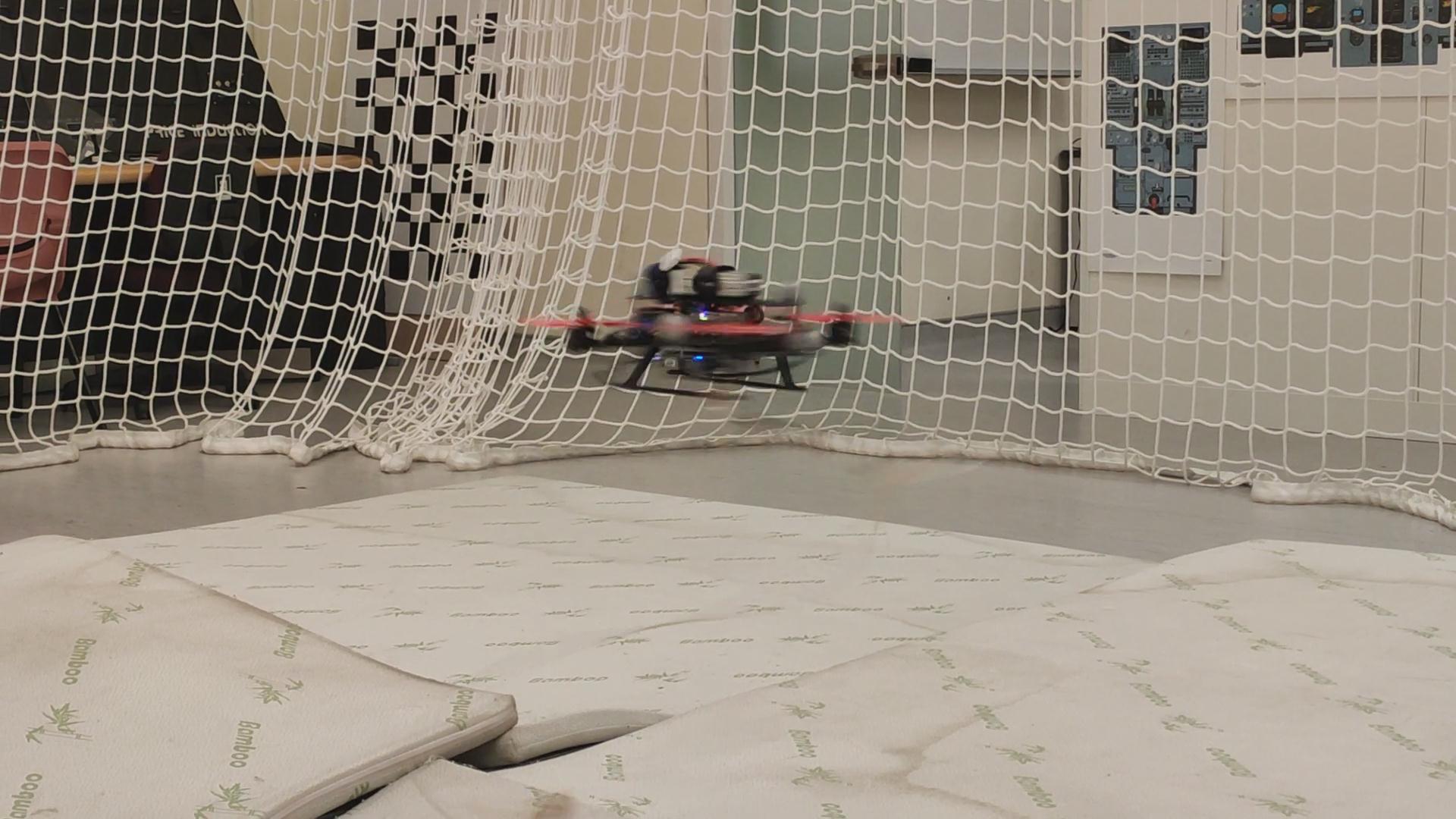
03.2025 From perception to action? Yes, our RAL paper proposes an end-to-end learning-based framework for UAVs to avoid obstacles in dynamic environments with high speeds.
Paper title: Flying in Highly Dynamic Environments With End-to-End Learning Approach
Video link: Youtube

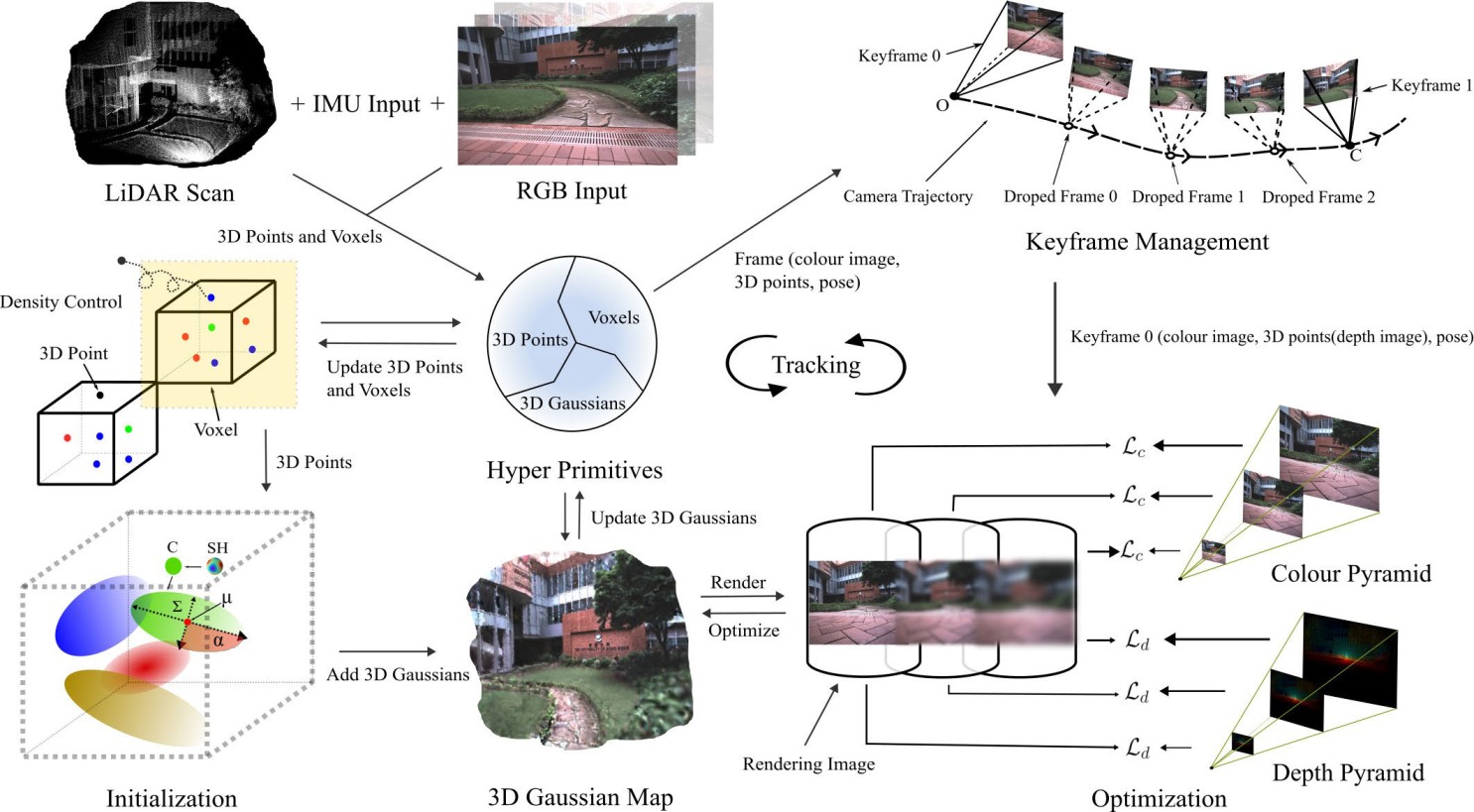
02.2025 Our work on 3D Gaussian Splatting has been accepted by IEEE Transactions on Instrumentation and Measurement.
Paper title: LVI-GS: Tightly-coupled LiDAR-Visual-Inertial SLAM using 3D Gaussian Splatting
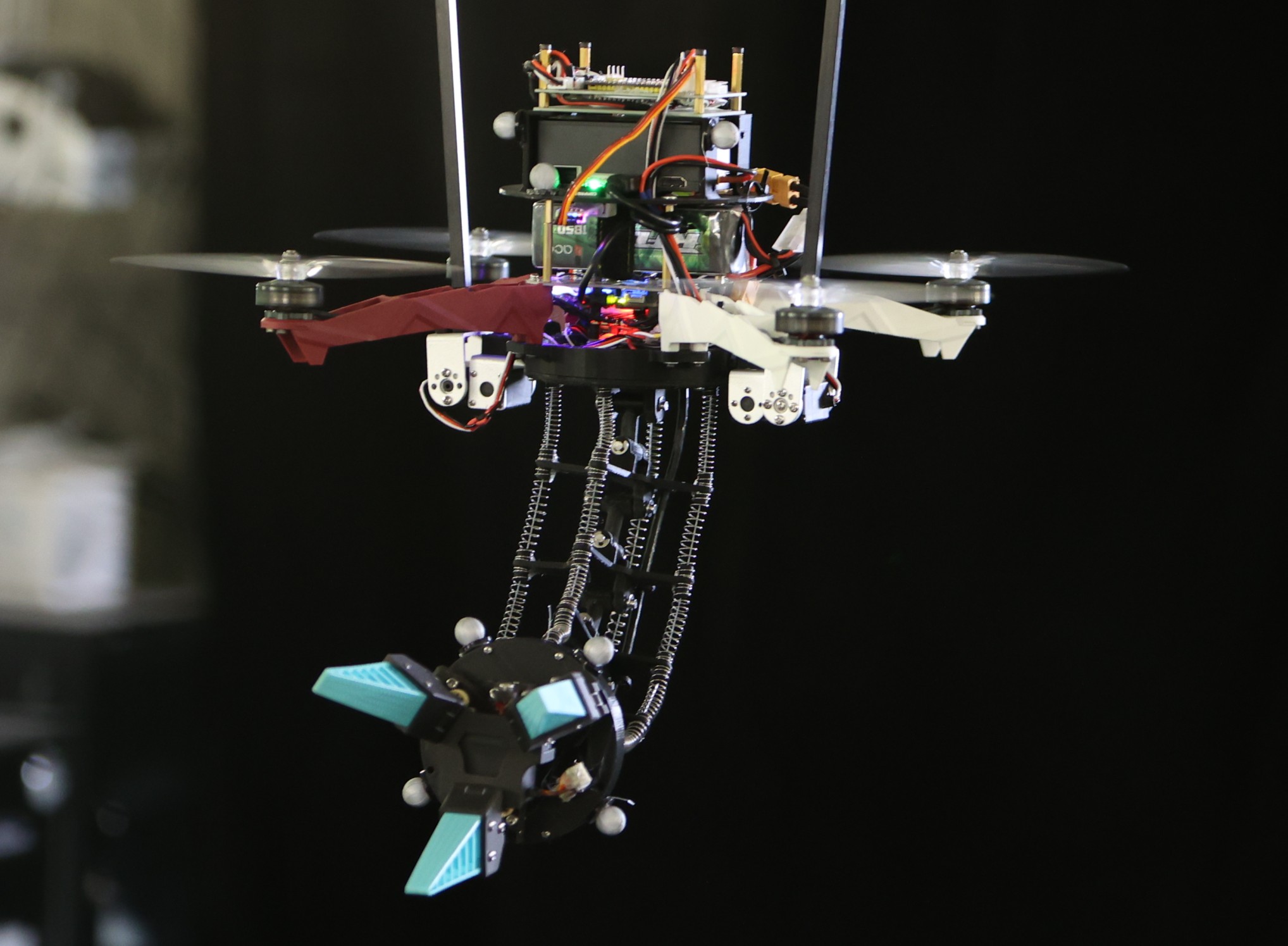
01.2025 Our AET paper has been published in Nature Communications.
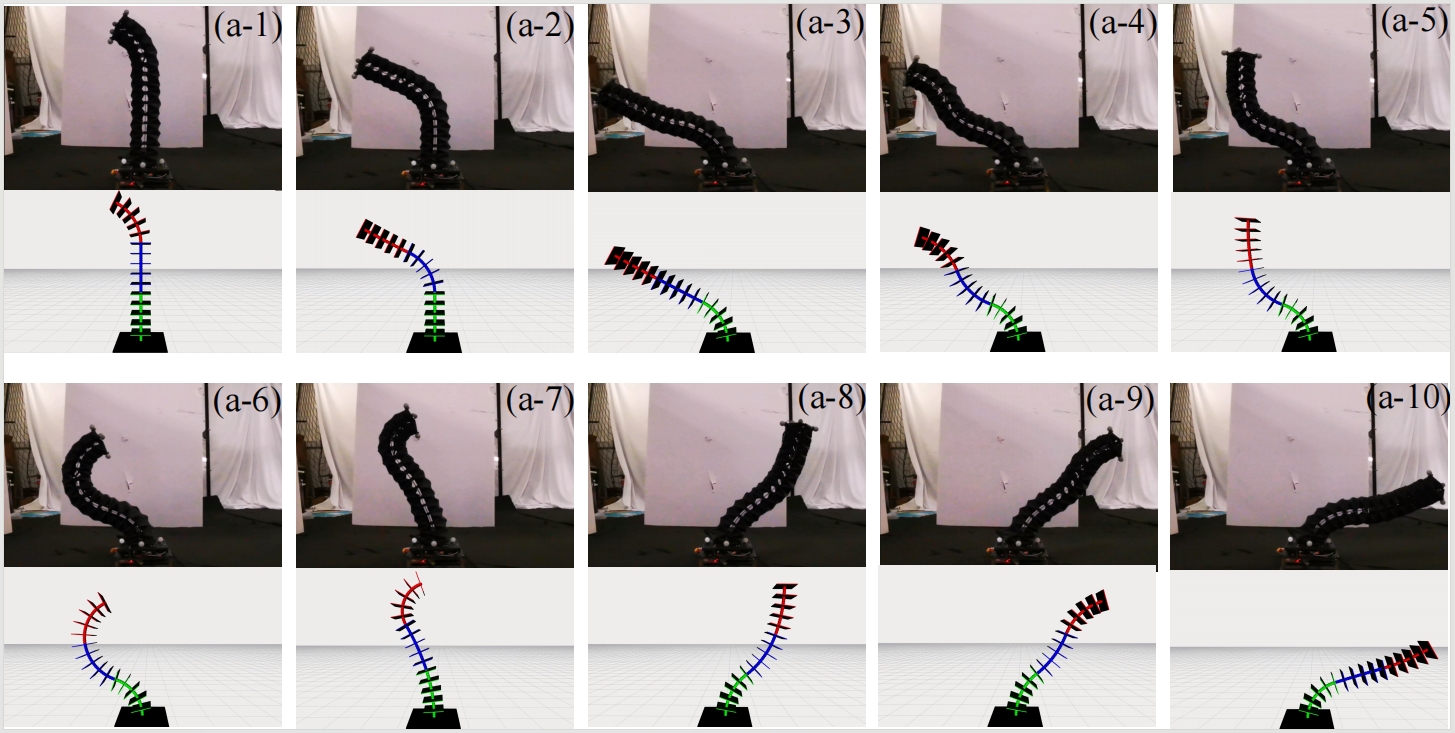
Paper title: A dexterous and compliant aerial continuum manipulator for cluttered and constrained environments
This paper proposes a highly dexterous and compliant aerial continuum manipulator (Aerial Elephant Trunk). We have proposed the design, designed the shape estimation method, developed a feedback controller, and proposed a whole-body motion planning module such that the UAV and the continuum manipulator could carry out tasks as a whole.
AET can perform various challenging aerial manipulation tasks, including but not limited to:
1) grasping object of various sizes and shapes;
2) traversing constrained pipelines with various shapes;
3) aerial writing/painting;
4) performing manipulation in various complex environments.
Main Video

Video Clips: Aerial shape deformation Aerial grasping Pipeline traversal
Aerial grasping in complex environments Aerial painting
12.2024 Our first PhD student at HKU has successfully defended his PhD thesis
12.2024 Have you ever seen an aerial continuum manipulator that can perform various challenging tasks?
We introduce Aerial Elephant Trunk (AET), which can perform dexterous manipulation tasks in complex environments that are filled with obstacles.
The paper has been accepted by Nature Communications.
More details will follow.

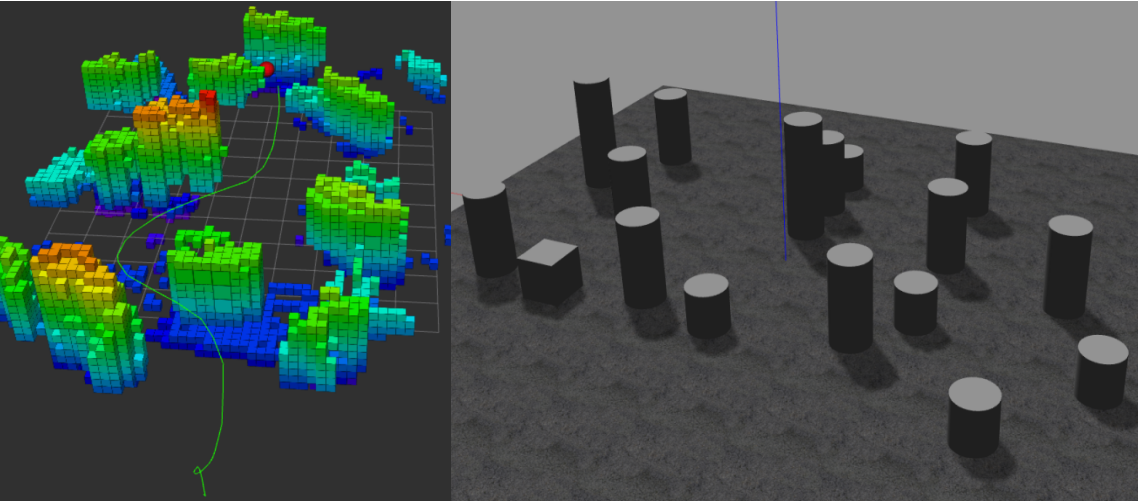
12.2024 Navigating in a highly dynamic and cluttered environment is a very complex task for UAVs. We propose FAPP, a fast and adaptive perception and planning framework for drones.
Check our latest IEEE Transactions on Robotics paper for more details:
Paper: FAPP: Fast and Adaptive Perception and Planning for UAVs in Dynamic Cluttered Environments
Video: FAPP
11.2024 We are honored to have Prof. Yunhui Liu visiting our lab.
09.2024 We are honored to have Prof. Toshio Fukuda visiting our lab.
08.2024 How to use Deep Reinforcement Learning for path planning and obstacle avoidance while achieving a similar smoothness performance of conventional methods? We propose an end-to-end approach that considers the motion constraints of differential drive robots, which can obtain a high velocity and smooth path while significantly reducing the processing time. Please see our IEEE transactions on intelligent vehicles paper for more details:
Paper: Mobile Robot Collision Avoidance Based on Deep Reinforcement Learning with Motion Constraints
Video: DRL
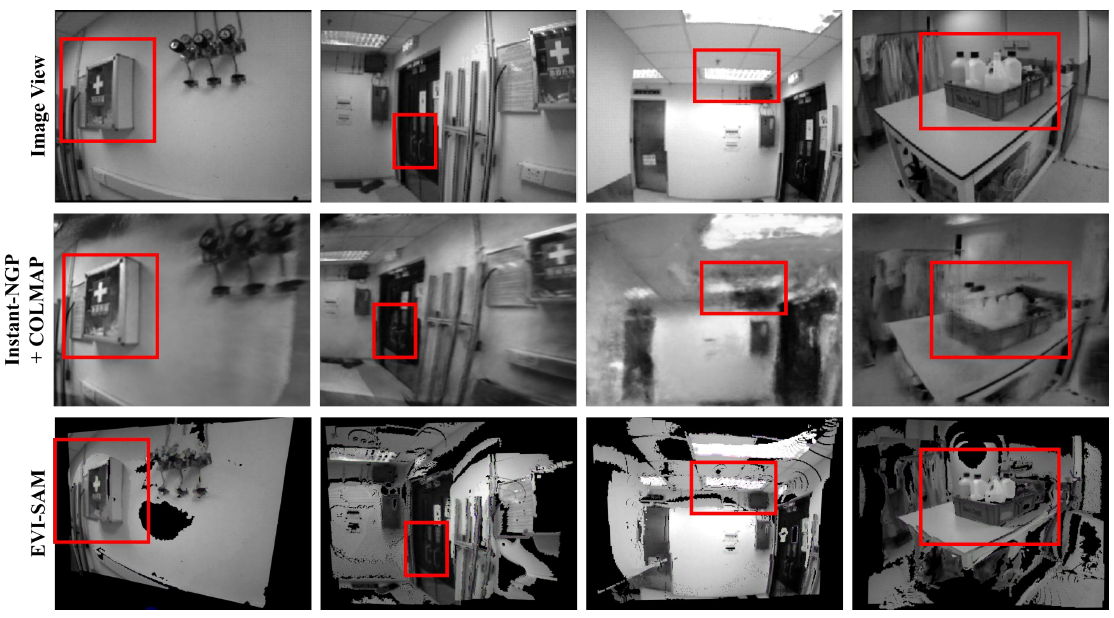
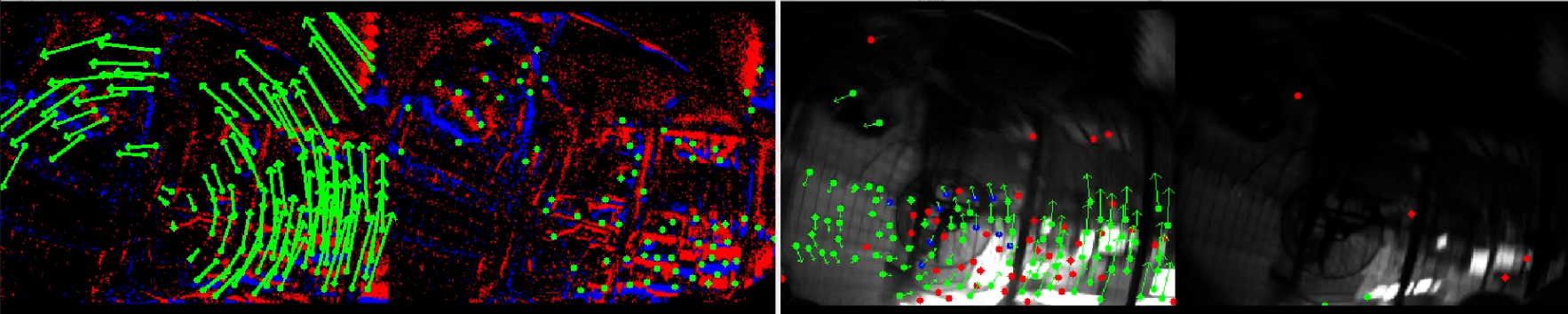
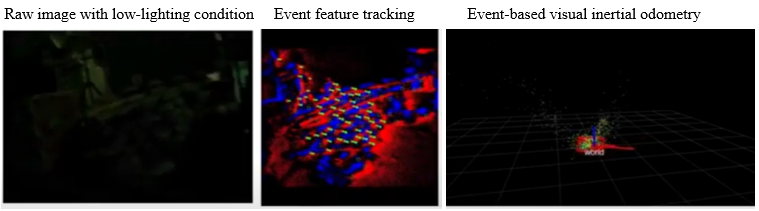
05.2024 3D dense mapping in aggressive motions remains challenging. We have used event cameras to improve dense mapping under aggressive motions. The performance is even better than several NERF-based methods.
Please check our Advanced Intelligent Systems paper for more details:
Paper: EVI-SAM: Robust, Real-Time, Tightly-Coupled Event–Visual–Inertial State Estimation and 3D Dense Mapping
Video: EVI-SAM
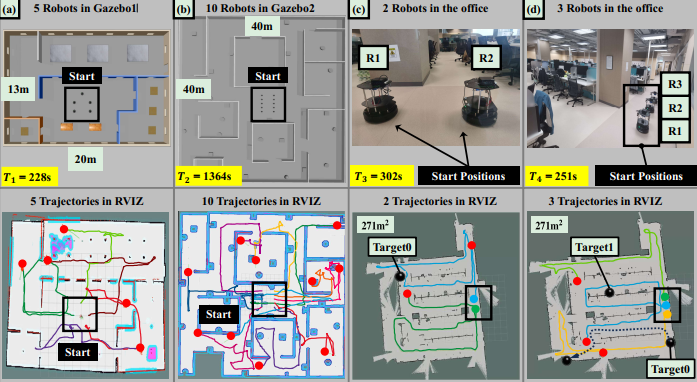
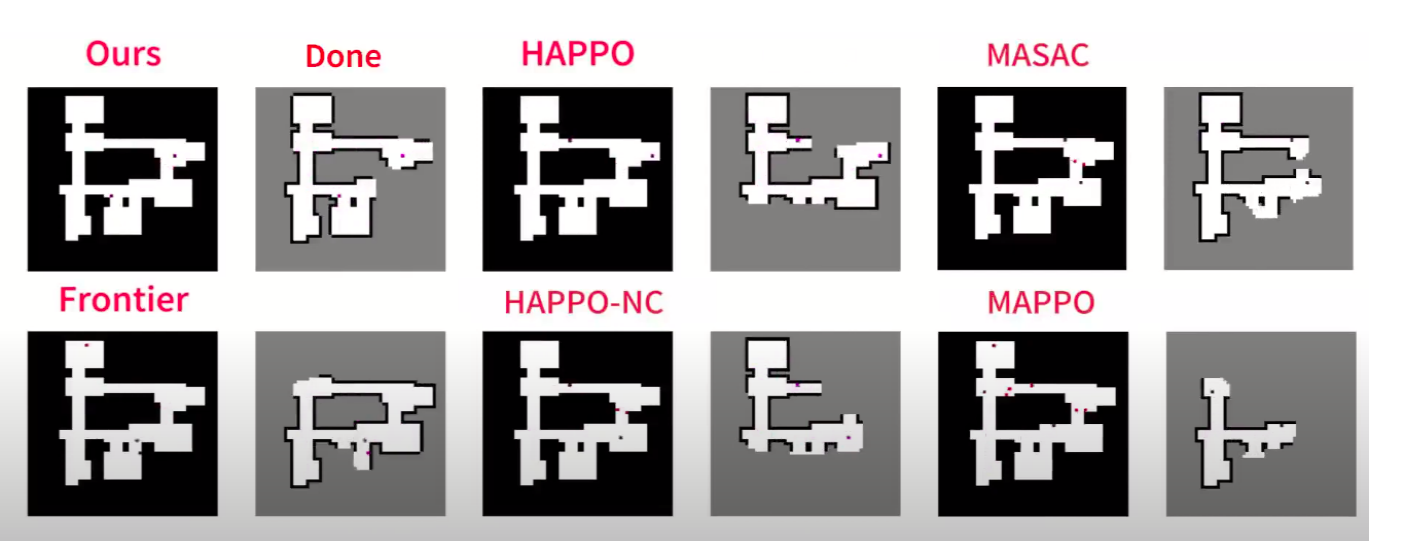
04.2024 How to search for unknown dynamic objects in unknown environments using multiple robots?
We provide a Multi-Agent Reinforcement Learning framework to solving this issue.
Check our RAL paper and video for more details:
Paper: HMA-SAR: Multi-Agent Search and Rescue for Unknown Located Dynamic Targets in Completely Unknown Environments
Video: HMA-SAR
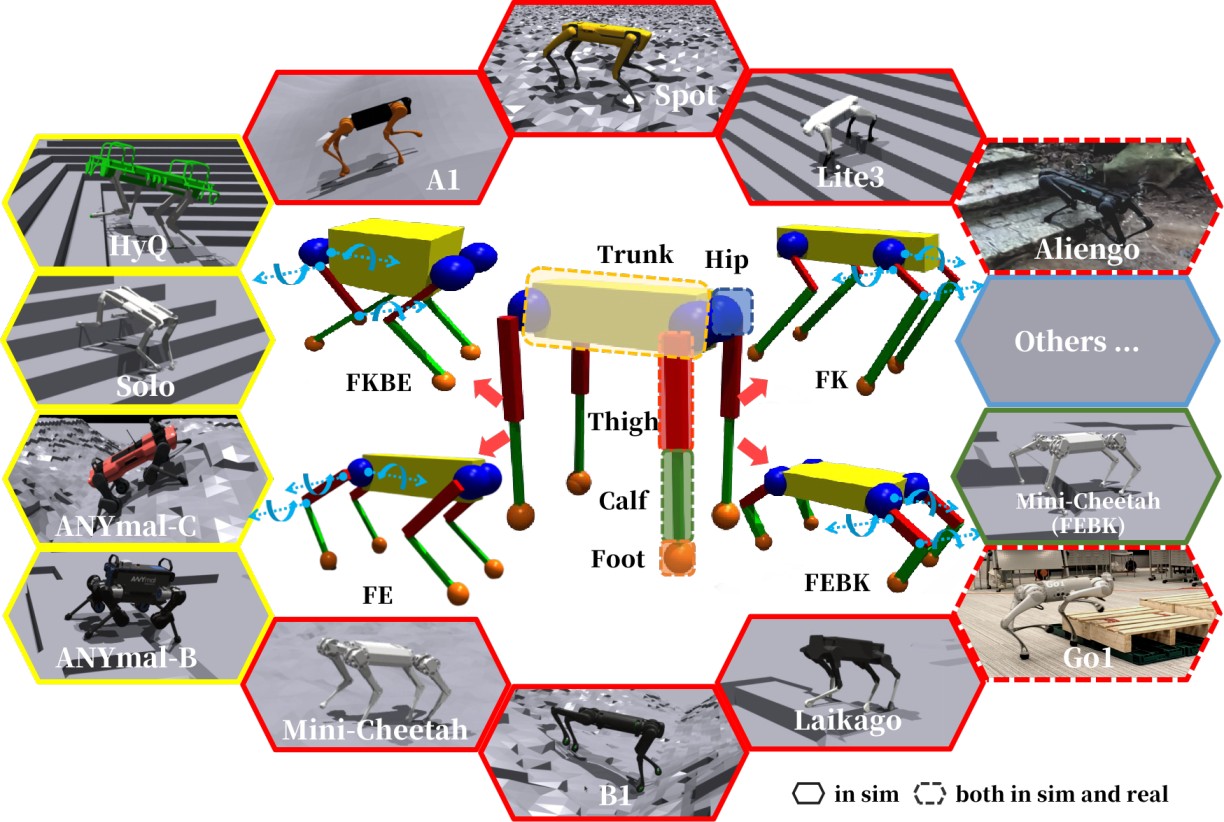
03.2024 How to control quadruped robots with various configurations (structures, size, weights, etc.) and allow them to walk stably in various terrains?
We provide one solution to that with our MorAL framework. See our RAL paper:
Title: MorAL: Learning Morphologically Adaptive Locomotion Controller for Quadrupedal Robots on Challenging Terrains
Video: MorAL
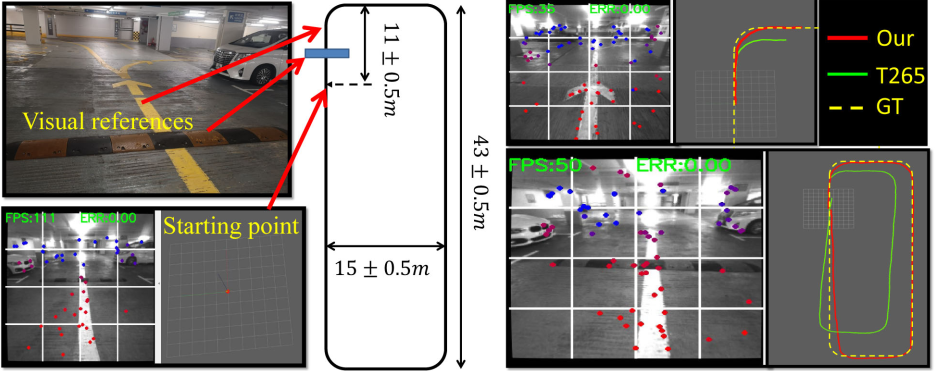
03.2024 We have just opensourced the software for our event-based visual odometry algorithm: ESVIO.
Code: Github Link
Paper: P. Chen, W. Guan and P. Lu, "ESVIO: Event-Based Stereo Visual Inertial Odometry," in IEEE Robotics and Automation Letters, vol. 8, no. 6, pp. 3661-3668, June 2023.
02.2024 Our paper on continuum robotic arm has been accepted by IEEE Robotics and Automation Letters.
A Tendon-driven Continuum Manipulator with Robust Shape Estimation by Multiple IMUs
11.2023 Our paper on SLAM has been accepted by IEEE Transactions on Intelligent Vehicles.
ECMD: An Event-Centric Multisensory Driving Dataset for SLAM
10.2023 Our paper on quadruped robot has been accepted by IEEE Robotics and Automation Letters:
FT-Net: Learning Failure Recovery and Fault-tolerant Locomotion For Quadruped Robots
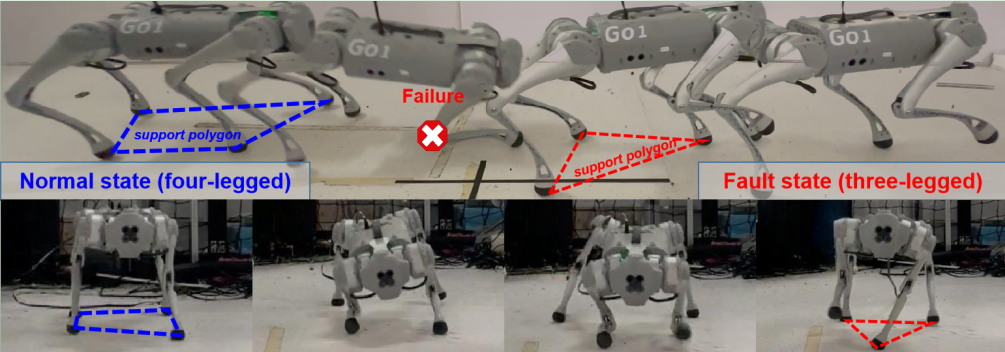
Our FT-net can enable quadruped robots to work even in the presence of partial and total rotor failures.
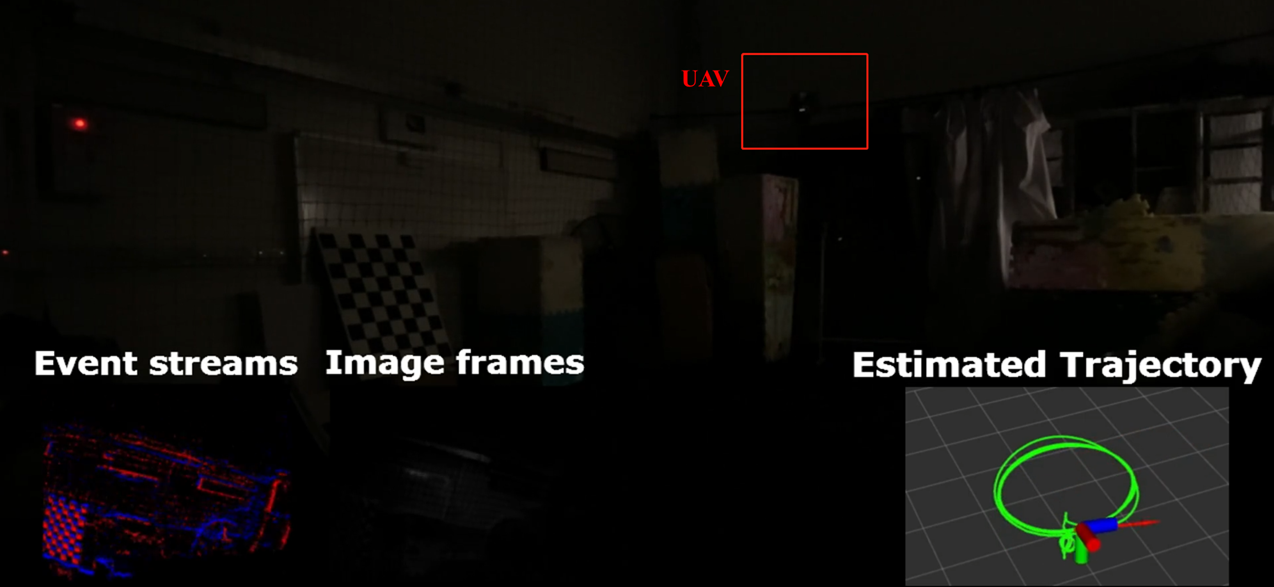
09.2023 Our paper on event-based visual odometry has been accepted by IEEE Transactions on Automation Science and Engineering:
PL-EVIO: Robust monocular event-based visual inertial odometry with point and line features
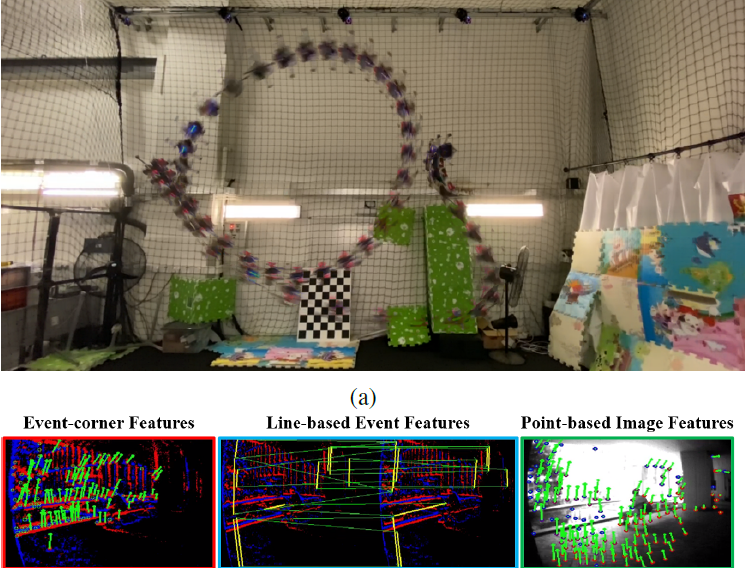
Our event-based VO can enable quadrotors to perform aggressive maneuvers by using the onboard estimation without replying on motion capture systems.
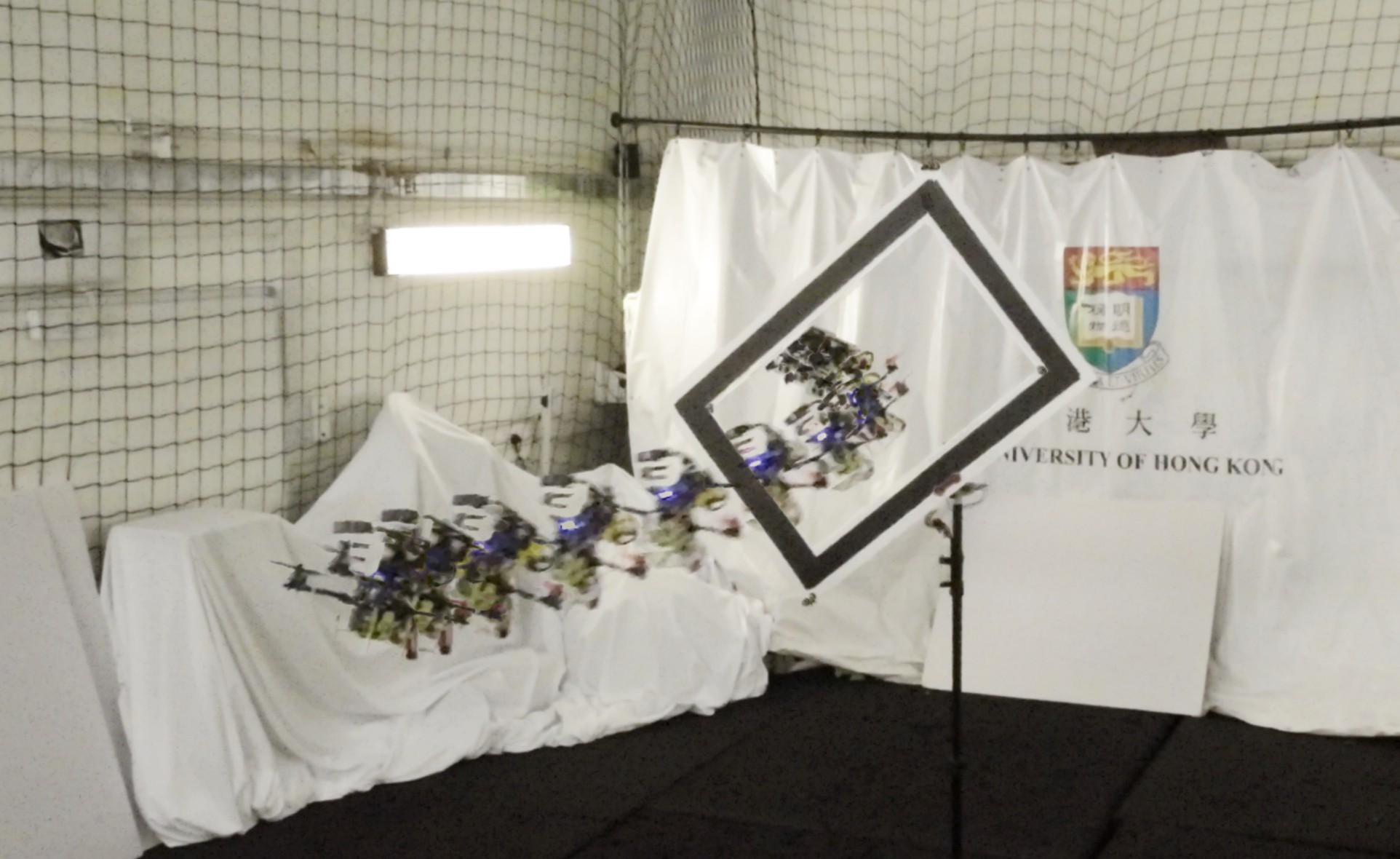
07.2023 Our paper on deep reinforcement learning has been accepted by IEEE Robotics and Automation Letters:
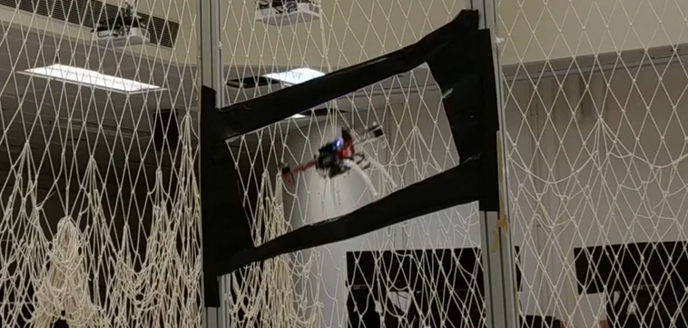
Learning Agile Flights through Narrow Gaps with Varying Angles using Onboard Sensing
06.2023 Our paper on dynamic obstacle avoidance has been accepted by IEEE/ASME Transactions on Mechatronics.
Title: Flying in Dynamic Scenes With Multitarget Velocimetry and Perception-Enhanced Planning

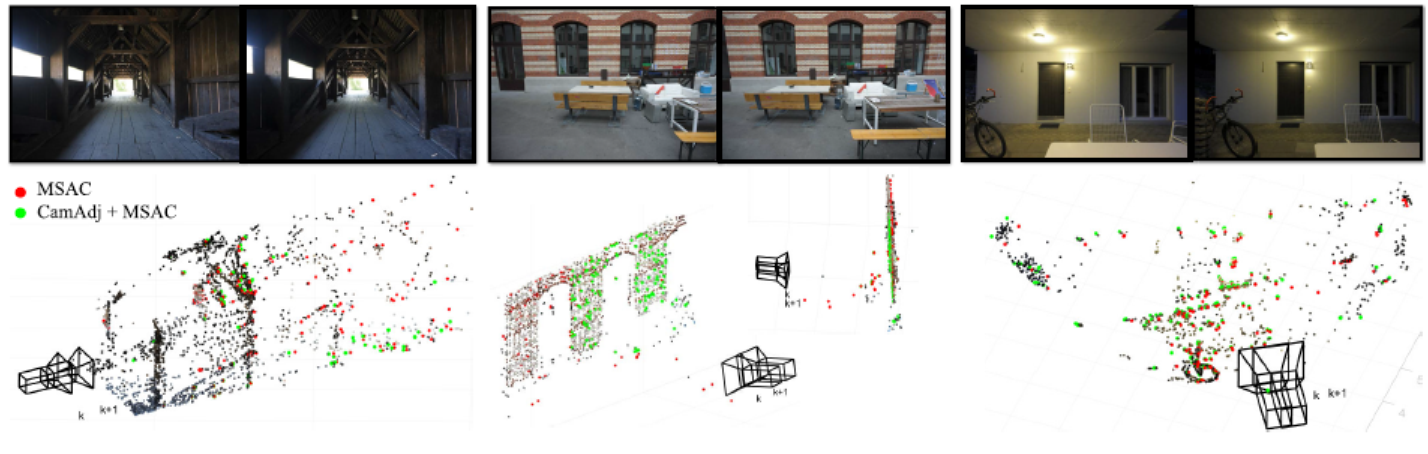
05.2023 Our paper on visual odometry has been accepted by IEEE Transactions on Instrumentation and Measurement
Title: Filtering 2D-3D Outliers by Camera Adjustment for Visual Odometry
04.2023 Our event-based VIO has been accepted by IEEE Robotics and Automation Letters:
ESVIO: Event-based Stereo Visual Inertial Odometry
The ESVIO can provide a stable and accurate state estimation in the presence of aggressive motions (aggressive rotational rates) and dark environments.
aggressive rotational rates:
from bright to dark environment:
Link VIDEO Youtube VIDEO bilibili
03.2023 We are excited to share our aerial continuum arm AeCoM.
AeCoM: An Aerial Continuum Manipulator with IMU-based Kinematic Modeling and Tendon-slacking Prevention. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 1-13.
LINK VIDEO Youtube VIDEO Bilibili
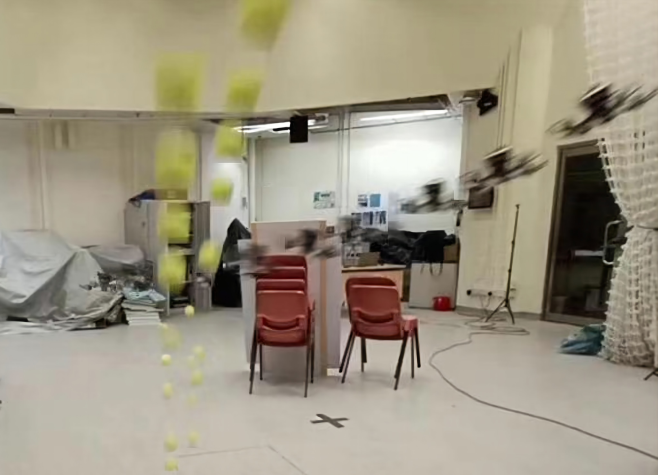
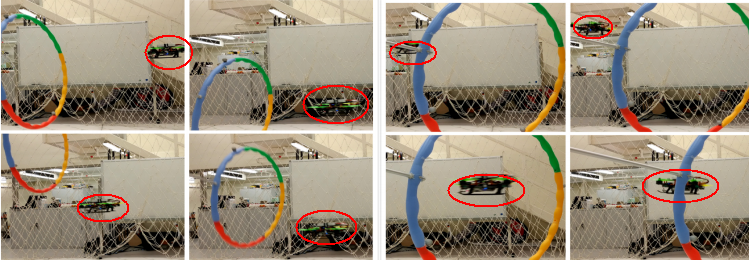
07.2022 Our paper Perception and Avoidance of Multiple Small Fast Moving Objects for Quadrotors with Only Low-cost RGBD Camera has been accepted by IEEE Robotics and Automation Letters
Our quadrotor can avoid multiple fast-moving tennis balls which are thrown simultaneously or continuously with only a RGBD camera.
PDF LINK VIDEO
07.2022 Our paper on event camera-based VIO has been acceptd by IROS 2022:
Monocular Event Visual Inertial Odometry based on Event-corner using Sliding Windows Graph-based Optimization
VIDEO
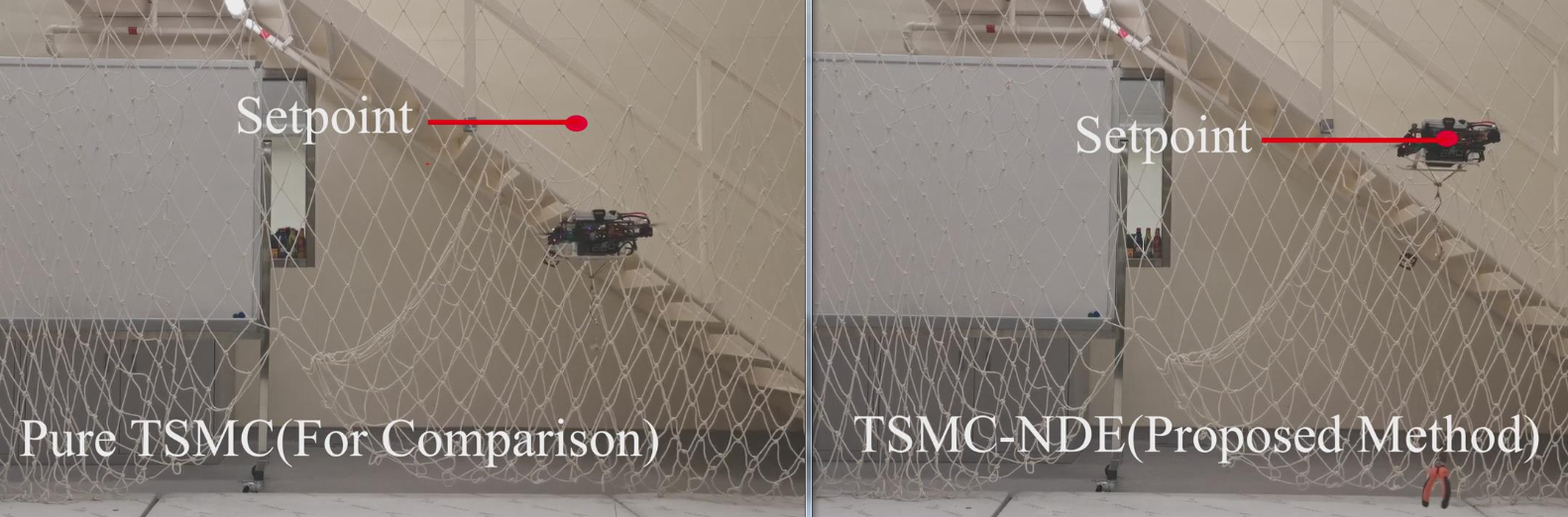
06.2022 Our paper has been accepted by Journal of Intelligent & Robotic Systems
Terminal Sliding Mode Control for Quadrotors with Chattering Reduction and Disturbances Estimator: Theory and Application (the work was finished in 2019)
VIDEO LINK
05.2022 Our papers have been accepted by Franklin Open.
Event-Triggered Integral Sliding Mode Formation Control for Multiple Quadrotor UAVs with Unknown Disturbances
Comparative Study of State and Unknown Input Estimation for Continuous-discrete Stochastic Systems.
12.04.2022 Our paper Real-time identification and avoidance of simultaneous static and dynamic obstacles on point cloud for UAVs navigation submitted to Robotics and Autonomous Systems has been accepted.
Our drone can avoid both static and dynamic obstacles while navigating in an unknown environment.
PDF Link VIDEO
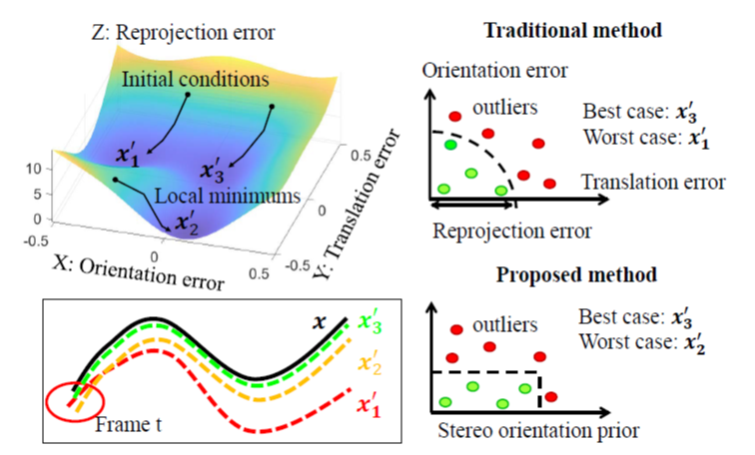
27.01.2022 Our paper Stereo Orientation Prior for UAV Robust and Accurate Visual Odometry is accepted by IEEE/ASME Transactions on Mechatronics.
Link VIDEO
15.09.2021 GUAN W.P. joins the lab as a PhD student. He will be working on SLAM for ground robots.
23.08.2021 Our paper is accepted by IEEE Transactions on Neural Networks and Learning Systems (TNNLS).
Title: Flying Through a Narrow Gap Using End-to-end Deep Reinforcement Learning Augmented with Curriculum Learning and Sim2Real
We used purely deep reinforcement learning to tackle the task instead of referring to any traditional methods.
PDF Link
Video
20.08.2021 LU Minghao, SUN Jiahao and XIE Yuhan joined the lab as PhD/Mphil students.
01.07.2021 Our paper is accepeted by IROS 2021.
Title: A Motion decoupled Aerial Robotic Manipulator for Better Inspection
We designed a motion decoupling mechanism and a gravity compensation mechanism to facilitate the use of these aerial manipulators for inspection tasks.
Video Link

01.11.2020 XU Juntao and XIE Yuhan joined the lab as research assistant. They work on the visual tracking and deep reinforcement learning for drones.
05.09.2020 PENG Rui joined the lab as a PhD student. He was a Research assistant working on the vision for UAVs.
03.09.2020
A preliminary demo of the quadrotor flight despite the loss of two propellers.
VIDEO
This is the demo video for the following paper:
P Lu, E van Kampen, Active fault-tolerant control for quadrotors subjected to a complete rotor failure, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 4698-4703.
01.09.2020
ArcLab has moved to department of Mechanical Engineering, the University of Hong Kong.
01.07.2020
NIE Shengyi and PENG Rui joined the group as a research assistant.
01.07.2020
Paper "Computationally Efficient Obstacle Avoidance Trajectory Planner for UAVs Based on Heuristic Angular Search Method" is accepted by IROS 2020. Experimental results coming soon.
VIDEO
17.01.2020
Paper "Nonsingular Terminal Sliding Mode Control for a Quadrotor UAV with a Total Rotor Failure" has been accepted and published online by Aerospace Science and Technology.
18.12.2019
A preliminary video of deep reinforcement learning for aggressive quadrotor flights.
We purely use deep reinforcement learning to plan the trajectory of a quadrotor to pass through titled narrow gaps.
VIDEO
15.12.2019
Paper "Performance comparison of representative model-based fault reconstruction algorithms for aircraft sensor fault detection and diagnosis"
has been accepted and published online by Aerospace Science and Technology.
04.12.2019
Paper "Dynamic Obstacle Avoidance for UAVs Using a Fast Trajectory Planning Approach " has been accepted by ROBIO 2019.
PDF LINK VIDEO(initial version)
Drone is passing through moving objects in real time.
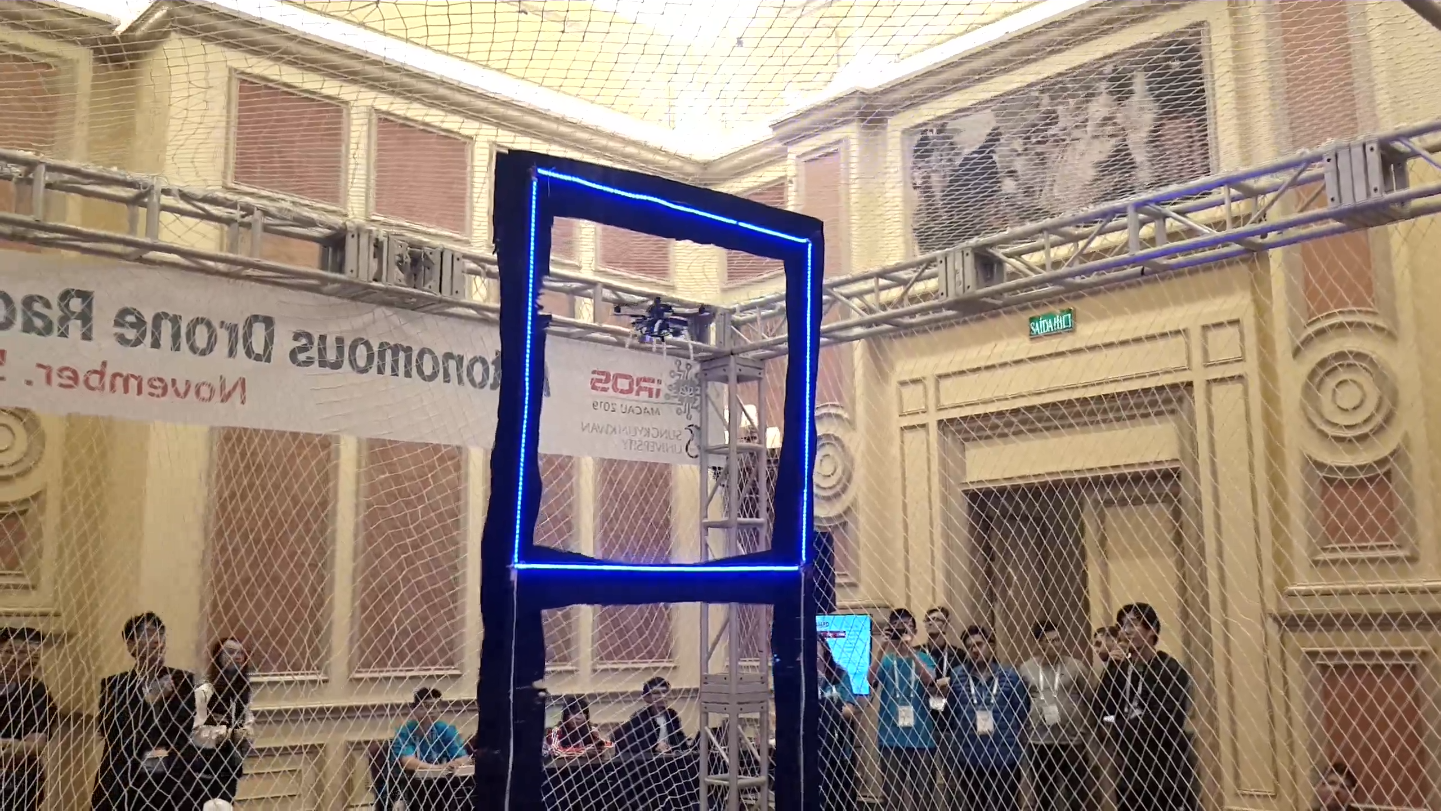
06.11.2019
We have won the thrid place in the IROS Autonomous Drone Racing competition.
Video for part of our flight during the competition.

16.10.2019
Welcome our new RA- Rui CAO.
20.09.2019
A preview of the work on accurate stereo visual odometry for quadrotors
We developed a stereo-vision Orientation prior visual odometry for UAV navigation.
Video
20.09.2019
A preview of the video regarding terminal sliding mode for quadrotors subjected to rotor failures and external disturbances. Our proposed method is very robust against partial rotor failures and external disturbances.
Video
30.08.2019
Welcome our new PhD Han Chen!
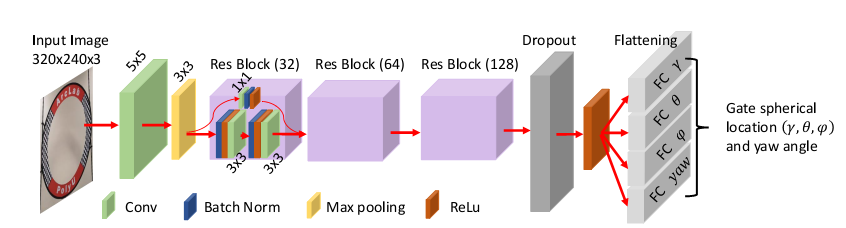
16.08.2019
Video of our work: Object Pose Estimation using end-to-end CNN for UAVs
Video
20.06.2019
Our paper titled "Adaptive Unscented Kalman Filter-based Disturbance Rejection With Application to High Precision Hydraulic Robotic Control" has been accepted by IROS 2019!
The video of the paper can be found at: Video
The preliminary version of the paper is at: PDF
.png)
Collaborative paper titled "Boundary Effect-Aware Visual Tracking for UAV with Online Enhanced Background Learning and Multi-Frame Consensus Verification" with Tong Ji University has been accepted by IROS 2019!
24.05.2019
Dr Lu is giving a Keynote at Global Conference on UAV application and Anti-UAV 2019.
30.03.2019
Keynote speech at ICEDME 2019.


25.02.2019
Welcome our new RA Yanhui Guo!
14.02.2019
Welcome our new Postdoc Zhiwei HOU!
14.01.2019
Welcome our new PhD student Ran DUAN!
Ran was working in our lab as a Research Assistant before his PhD Study.
02.01.2019
Welcome our new Research Assistant Zhangjie TU!
28.11.2018
Dr Peng Lu is invited to give a talk at South China University of Technology.
Advanced control techniques for autonomous UAVs and robotics


14.11-16.11 2018
Dr Peng Lu is invited to give a two-day lecture at Chengdu Aircraft Design & Research Institute.
31.10.2018
Welcome our new Research Assistant Ran DUAN!
18.10.2018
Our paper titled "Nonlinear Disturbance Attenuation Control of Hydraulic Robotics"
has been accepted by ROBIO 2018!
We present an efficient and effective control approach for robotics such as hydraulic robots.
The link is at: Paper
The paper is at: PDF
The video is at: Youtube Link
12.10.2018
Welcome visitors from Hong Kong Institution of Engineers (HKIE).
We have performed two successful UAV demos.

01.10.2018
Welcome our new visiting PhD student Qizhi He!
21.09.2018
Welcome our new RA Chenxi Xiao!
25.07.2018
Collaborative paper with TU Delft is accepted by Journal of Guidance, Control and Dynamics!
Incremental Sliding Mode Fault-Tolerant Flight Control
29.06.2018
Collaborative paper with ETH&UZH RPG Group is accepted by IROS 2018!
PAMPC: Perception-Aware Model Predictive Control for Quadrotors
 24.05.2018
24.05.2018Dr. Peng Lu is invited to give a talk at Northwestern Polytechnical University.
The topic is: Nonlinear controllers for unmanned aerial vehicles: challenges and applications
 27.12.2017
27.12.2017Dr. Peng Lu is invited to give a talk at Shanghai Jiao Tong University.
The topic is: Advanced motion planning and control techniques for robotics