2025
Y Dong, J Ma, L Zhao, W Li, P Lu, "MARG: MAstering Risky Gap Terrains for Legged Robots with Elevation Mapping," IEEE Transactions on Robotics, 2025, 1-17.
LINK VIDEO
L Zhao, Z Luo, Y Han, J Zhang, Y Chen, Y Liu, P Lu, "Learning Aggressive Animal Locomotion Skills for Quadrupedal Robots Solely from Monocular Videos," Nature Portfolio Journal Robotics (npj Robotics), 2025, 3:32, 1-17.
LINK VIDEO
Z Luo, J Zhang, Y Han, J Ma, M Lu, I Havoutis, P Lu, "Learning Highly Dynamic Skills Transition for Quadruped Jumping Through Constrained Space," Advanced Robotics Research, 2025, 0:e2500032.
LINK VIDEO
Y Chen, J Ma, Z Luo, Y Han, Y Dong, B Xu, P Lu, "Learning Autonomous and Safe Quadruped Traversal of Complex Terrains Using Multi-Layer Elevation Maps," IEEE Robotics and Automation Letters, 2025, 10 (10), 9606 - 9613. (IEEE Spectrum report)
LINK VIDEO
E Xiao, Y Dong, J Lam, P Lu, "Learning stable bipedal locomotion skills for quadrupedal robots on challenging terrains with automatic fall recovery," Nature Portfolio Journal Robotics (npj Robotics), 2025.
LINK VIDEO
E Xiao, Y Dong, J Ma, P Lu, "Stable Imitation of Multi-Gait and Bipedal Motions for Quadrupedal Robots over Uneven Terrains," Advanced Robotics Research, 2025, 1-10.
LINK VIDEO
Y Han, J Zhang, Z Luo, Y Dong, J Lin, L Zhao, S Dong, P Lu, "OmniNet: Omnidirectional Jumping Neural Network with Height-awareness for Quadrupedal Robots," IEEE Robotics and Automation Letters, 2025, 10 (8), 7915-7922.
LINK VIDEO
R Peng, P Deng, D Tang, P Lu, "Numerical Optimization-based Kinematics with Pose Tracking Control for Continuum Robots," IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025, 1-7.
LINK VIDEO
W Li, J Ma, M Lu, P Lu, "Like Playing a Video Game: Spatial-Temporal Optimization of Foot Trajectories for Controlled Football Kicking in Bipedal Robots," IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025, 1-7.
LINK VIDEO
Y Lu, Y Dong, J Zhang, J Ma, P Lu, "FR-Net: Learning Robust Quadrupedal Fall Recovery on Challenging Terrains through Mass-Contact Prediction," IEEE Robotics and Automation Letters, 2025, 10 (7), 6632 - 6639.
LINK VIDEO
M Li, Y Tao, X Cao, P Lu, "DAPTP: Distributed Awareness Planner using time potential for dynamic target search," Robotics and Autonomous Systems, 2025, 191, 105010.
LINK VIDEO
Z Chen, Y Qi, D Feng, X Zhuang, H Chen, X Hu, J Wu, K Peng, P Lu, "Heterogeneous lidar dataset for benchmarking robust localization in diverse degenerate scenarios," International Journal of Robotics Research, 2025, 1-15.
LINK VIDEO
X Fan, M Lu, B Xu, P Lu, "Flying in Highly Dynamic Environments with End-to-end Learning Approach," IEEE Robotics and Automation Letters, 2025, 10 (4), 3851-3858.
LINK VIDEO
H Zhao, W Guan, P Lu, "LVI-GS: Tightly-coupled LiDAR-Visual-Inertial SLAM using 3D Gaussian Splatting," IEEE Transactions on Instrumentation and Measurement, 2025, 74, 1-10.
LINK VIDEO
R Peng, M Lu, Y Wang, P Lu, "A dexterous and compliant aerial continuum manipulator for cluttered and constrained environments," Nature Communications, 2024, 1-24.
LINK VIDEO
2024
M Lu, X Fan, H Chen, P Lu, "FAPP: Fast and Adaptive Perception and Planning for UAVs in Dynamic Cluttered Environments," IEEE Transactions on Robotics, 2024, 1-16.
LINK VIDEO
Y Tao, M Li, X Cao, P Lu, "Mobile Robot Collision Avoidance Based on Deep Reinforcement Learning with Motion Constraints," IEEE Transactions on Intelligent Vehicles, 2024, 1-11.
LINK VIDEO
W Guan, P Chen, H Zhao, Y Wang, P Lu, "EVI-SAM: Robust, Real-time, Tightly-coupled Event-Visual-Inertial State Estimation and 3D Dense Mapping," Advanced Intelligent Systems, 2024, 1-24.
LINK VIDEO
X Cao, M Li, Y Tao, P Lu, "HMA-SAR: Multi-Agent Search and Rescue for Unknown Located Dynamic Targets in Completely Unknown Environments," IEEE Robotics and Automation Letters, 2024, 1-8.
LINK VIDEO
Z Luo, Y Dong, X Li, R Huang, Z Shu, E Xiao, P Lu, "MorAL: Learning Morphologically Adaptive Locomotion Controller for Quadrupedal Robots on Challenging Terrains," IEEE Robotics and Automation Letters, 2024, 1-8.
LINK VIDEO
R Peng, Y Wang, P Lu, "A Tendon-Driven Continuum Manipulator With Robust Shape Estimation by Multiple IMUs," IEEE Robotics and Automation Letters, 2024, 9(4), 3084 - 3091.
LINK VIDEO
2023
P Chen, W Guan, F Huang, Y Zhong, W Wen, L-T Hsu, P Lu, "ECMD: An Event-Centric Multisensory Driving Dataset for SLAM," IEEE Transactions on Intelligent Vehicles, 2023, 1-10.
LINK
Z Luo, E Xiao, P Lu, "FT-Net: Learning Failure Recovery and Fault-tolerant Locomotion For Quadruped Robots," IEEE Robotics and Automation Letters, 2023, 12(8):8414-8421.
LINK VIDEO
W Guan, P Chen, Y Xie, P Lu, "PL-EVIO: Robust monocular event-based visual inertial odometry with point and line features," IEEE Transactions on Automation Science and Engineering, 2023, 1-17.
LINK VIDEO
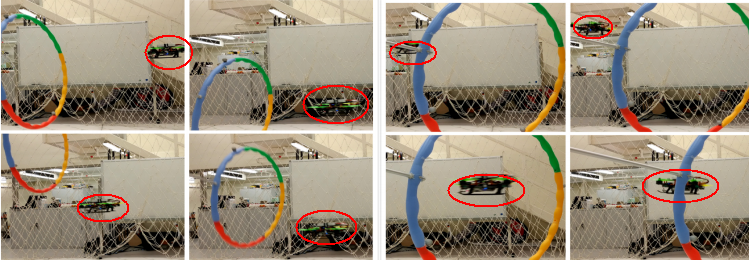
Y Xie, M Lu, R Peng, P Lu, "Learning Agile Flights through Narrow Gaps with Varying Angles using Onboard Sensing," IEEE Robotics and Automation Letters, 2023, 8(9), 5424 - 5431.
LINK VIDEO
H Chen, CY Wen, F Gao, P Lu, "Flying in Dynamic Scenes With Multitarget Velocimetry and Perception-Enhanced Planning," IEEE/ASME Transactions on Mechatronics, 2023, 1-12.
LINK
R Duan, DP Paudel, CY Wen, P Lu, "Filtering 2D-3D Outliers by Camera Adjustment for Visual Odometry," IEEE Transactions on Instrumentation and Measurement, 2023, 72, 1-12.
LINK
C Fu, T Li, J Ye, G Zheng, S Li, P Lu, "Scale-Aware Domain Adaptation for Robust UAV Tracking," in IEEE Robotics and Automation Letters, 2023, 8(6):3764 - 3771 .
LINK
H Chen, S Chen, P Lu, CY Wen, "A Fast Planning Approach for 3D Short Trajectory with a Parallel Framework," Mechatronics, 2023, 1-12.
LINK
Y Yang, Z Hou, H Chen, P Lu, "DRL-based Path Planner and its Application in Real Quadrotor with LIDAR," Journal of Intelligent & Robotic Systems, 2023, 107(38):1-12.
LINK
P. Chen, W. Guan and P. Lu, "ESVIO: Event-Based Stereo Visual Inertial Odometry," in IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2023.3269950.
LINK VIDEO
R. Peng, Z. Wang and P. Lu, "AeCoM: An Aerial Continuum Manipulator With IMU-Based Kinematic Modeling and Tendon-Slacking Prevention," in IEEE Transactions on Systems, Man, and Cybernetics: Systems, doi: 10.1109/TSMC.2023.3257166.
LINK VIDEO
2022
M Lu, H Chen, P Lu, Perception and Avoidance of Multiple Small Fast Moving Objects for Quadrotors with Only Low-cost RGBD Camera, IEEE Robotics and Autonomous Letters, 2022,1-8.
PDF LINK VIDEO
Z Hou, P Lu, Terminal Sliding Mode Control for Quadrotors with Chattering Reduction and Disturbances Estimator: Theory and Application, Journal of Intelligent & Robotic Systems, 2022, 105(71):1-21.
VIDEO LINK
H Chen, P Lu, Q He, Real-time identification and avoidance of simultaneous static and dynamic obstacles on point cloud for UAVs navigation, Robotics and Autonomous Systems, 2022,154, 104124.
PDF Link VIDEO
R Duan, DP Paudel, C Fu, P Lu, Stereo Orientation Prior for UAV Robust and Accurate Visual Odometry, IEEE/ASME Transactions on Mechatronics, 2022, 1-14.
Link VIDEO
Z Hou, P Lu, Event-Triggered Integral Sliding Mode Formation Control for Multiple Quadrotor UAVs with Unknown Disturbances, Franklin Open, 2022, 1-39.
Link
P Lu, Comparative Study of State and Unknown Input Estimation for Continuous-discrete Stochastic Systems, Franklin Open, 2022, 1-14.
Link CODE
H Lin, S Lu, P Lu, H Que, P Sun, Centralized fusion estimation over wireless sensor-actuator networks with unobservable packet dropouts, Journal of the Franklin Institute 2022, 359 (2), 1569-1584.
Link
2021
C Xiao, P Lu, Q He, Flying Through a Narrow Gap Using End-to-end Deep Reinforcement Learning Augmented with Curriculum Learning and Sim2Real, IEEE Transactions on Neural Networks and Learning Systems, 2021, 1-8.
PDF Link VIDEO CODE
P Lu, E van Kampen, CC de Visser, Q Chu, Angular acceleration estimation-based incremental nonlinear dynamic inversion for robust flight control, IEEE Transactions on Control Systems Technology. 2020, 1-9.
PDF Link CODE
Y Li, X Liu, P Lu, Q He, R Ming, W Zhang, Air Data Sensor Fault Detection and Diagnosis in the Presence of Atmospheric Turbulence: Theory and Experimental Validation With Real Flight Data, Control Engineering Practice. 2021, 117, 104938.
Link
R Peng, X Chen, P Lu, A Motion decoupled Aerial Robotic Manipulator for Better Inspection, IROS, 2021.
VIDEO
R Peng, P Lu, Fast Adaptive Complementary Filter for Quadrotor Attitude Estimation During Aggressive Maneuvers, 2021 International Conference on Unmanned Aircraft Systems (ICUAS), 182-187.
2020
F Li, C Fu, F Lin, Y Li, P Lu, Training-set distillation for real-time uav object tracking, 2020 IEEE International Conference on Robotics and Automation (ICRA), 9715-9721.
Han Chen and Peng Lu, Computationally Efficient Obstacle Avoidance Trajectory Planner for UAVs Based on Heuristic Angular Search Method, IROS, 2020.
PDF VIDEO
C Fu, X Yang, F Li, J Xu, C Liu, P Lu, Learning Consistency Pursued Correlation Filters for Real-Time UAV Tracking, IROS, 2020, 8293-8300.
Y He, C Fu, F Lin, Y Li, P Lu, Towards robust visual tracking for unmanned aerial vehicle with tri-attentional correlation filters, 2020 IROS, 2020, 1575-1582.
Z Hou, P Lu, Z Tu, Nonsingular Terminal Sliding Mode Control for a Quadrotor UAV with a Total Rotor Failure, Aerospace Science and Technology, 2020.
PDF Link VIDEO
2019
Q He, W Zhang, P Lu, J Liu, Performance comparison of representative model-based fault reconstruction algorithms for aircraft sensor fault detection and diagnosis, Aerospace Science and Technology, 2019.
PDF Link CODE
 Han Chen, Chenxi Xiao, Peng Lu,
Dynamic Obstacle Avoidance for UAVs Using a Fast Trajectory Planning Approach,
2019 IEEE International Conference on Robotics and Biomimetics
(ROBIO).
Han Chen, Chenxi Xiao, Peng Lu,
Dynamic Obstacle Avoidance for UAVs Using a Fast Trajectory Planning Approach,
2019 IEEE International Conference on Robotics and Biomimetics
(ROBIO).PDF Link VIDEO
P Lu, T Sandy, J Buchli, Adaptive Unscented Kalman Filter-based Disturbance Rejection With Application to High Precision Hydraulic Robotic Control, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), accepted.
PDF VIDEO
Z. Huang, C. Fu, Y. Li, F. Lin, P. Lu. Learning aberrance repressed correlation filters for real-time uav tracking, 2019 Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2891-2900.
Z. Huang, C. Fu, Y. Li, F. Lin, P. Lu, Boundary Effect-Aware Visual Tracking for UAV with Online Enhanced Background Learning and Multi-Frame Consensus Verification, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), accepted.
X Wang, E Van Kampen, QP Chu, P Lu, Stability Analysis for Incremental Nonlinear Dynamic Inversion Control, Journal of Guidance, Control and Dynamics, 2019, 42(5):1116-1129.
Link
X Wang, E Van Kampen, QP Chu, P Lu, Incremental Sliding Mode Fault-Tolerant Flight Control, Journal of Guidance, Control and Dynamics, 2019, 49(2):244-259.
Link
2018
 P. Lu, T. Sandy, J. Buchli. Nonlinear disturbance attenuation control of hydraulic robotics. IEEE International Conference on Robotics and Biomimetics (ROBIO), 2018.
P. Lu, T. Sandy, J. Buchli. Nonlinear disturbance attenuation control of hydraulic robotics. IEEE International Conference on Robotics and Biomimetics (ROBIO), 2018.
Link | PDF | Video
D. Falanga, P. Foehn, P. Lu, D. Scaramuzza, PAMPC: Perception-Aware Model Predictive Control for Quadrotors. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
X Wang, E Van Kampen, QP Chu, P Lu, Stability Analysis for Incremental Nonlinear Dynamic Inversion Control, 2018 AIAA Guidance, Navigation, and Control Conference, 1115
Link
2017
P Lu, E Van Kampen, QP Chu, Efficient Nonlinear Actuator Fault Reconstruction System, AIAA Guidance, Navigation, and Control Conference 2017, 1263
Link
P Lu, E van Kampen, CC de Visser, Q Chu, Framework for Simultaneous Sensor and Actuator Fault-Tolerant Control, Journal of Guidance, Control and Dynamics 2017, 40(8):2133-2136
Link
2016
P Lu, E van Kampen, CC de Visser, Q Chu, Aircraft Fault-Tolerant Trajectory Control Using Incremental Nonlinear Dynamic Inversion, Control Engineering Practice 2016
Link
 P Lu,
Fault Diagnosis and Fault-Tolerant Control for Aircraft Subjected to Sensor and Actuator Faults,
Delft University of Technology, 2016
P Lu,
Fault Diagnosis and Fault-Tolerant Control for Aircraft Subjected to Sensor and Actuator Faults,
Delft University of Technology, 2016
PDF | Link
P Lu, E van Kampen, CC de Visser, QP Chu, Framework for State and Unknown Input Estimation of Linear Time-varying Systems, Automatica 2016, 73, 145-154
Link
P Lu, E van Kampen, C de Visser, Q Chu, Nonlinear aircraft sensor fault reconstruction in the presence of disturbances validated by real flight data, Control Engineering Practice 2016, 49, 112-128
Link
P Lu, L Van Eykeren, E van Kampen, CC de Visser, QP Chu, Adaptive Three-Step Kalman Filter for Air Data Sensor Fault Detection and Diagnosis, Journal of Guidance, Control and Dynamics 2016
Link
2015
P Lu, E van Kampen, Active fault-tolerant control for quadrotors subjected to a complete rotor failure, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 4698-4703
PDF | Link
P Lu, L Van Eykeren, E van Kampen, Q Chu, Selective-Reinitialization Multiple-Model Adaptive Estimation for Fault Detection and Diagnosis, Journal of Guidance, Control, and Dynamics 2015, 38 (8), 1409-1424
Link
P Lu, L Van Eykeren, E van Kampen, Q Chu, Sensor fault detection and estimation for quadrotors using kinematic equations, Advances in Aerospace Guidance, Navigation and Control 2015, 363-379
Link
P Lu, L Van Eykeren, E van Kampen, C de Visser, Q Chu, Double-model adaptive fault detection and diagnosis applied to real flight data, Control Engineering Practice 2015, 36, 39-57
Link
D Jatiningrum, P Lu, C de Visser, Q Chu, M Mulder, Development of a New Method for Calibrating an Angular Accelerometer Using a Calibration Table, AIAA Guidance, Navigation, and Control Conference 2015, 1-13
Link
P Lu, L Van Eykeren, E Van Kampen, QP Chu, Air Data Sensor Fault Detection and Diagnosis with Application to Real Flight Data, AIAA Guidance, Navigation, and Control Conference, 1-20
Link
P. Lu, E. van Kampen, Q. Chu. Nonlinear Quadrotor Control with Online Model Identification. Advances in Aerospace Guidance, Navigation and Control, 81-98.
Book Chapter
P. Lu, L. Van Eykeren, E. van Kampen, Q. Chu. Sensor Fault Detection and Estimation for Quadrotors Using Kinematic Equations. Advances in Aerospace Guidance, Navigation and Control, 363-379.
Book Chapter
P Lu, E Van Kampen, Active fault-tolerant control system using incremental backstepping approach, AIAA Guidance, Navigation, and Control Conference 2015, 1-18
Best Student Paper Finalists
Link
P Lu, E van Kampen, QP Chu, Nonlinear Quadrotor Control with Online Model Identification, Advances in Aerospace Guidance, Navigation and Control 2015, 81-98
Link
P Lu, E van Kampen, QP Chu, Robustness and Tuning of Incremental Backstepping Approach, AIAA Guidance, Navigation, and Control Conference 2015, 1-15
Link
P Lu, E van Kampen, CC de Visser, QP Chu, Aircraft Inertial Measurement Unit Fault Identification with Application to Real Flight Data, Journal of Guidance, Control and Dynamics 2015, 38 (12), 2467-2475
Link
2014
P Lu, E van Kampen, Selective-Reinitialization Multiple Model Adaptive Estimation for Fault Detection and Diagnosis, AIAA guidance, navigation, and control conference 2014, 1-18
Best Student Paper Finalists
Link
P Lu, E Van Kampen, B Yu, Actuator fault detection and diagnosis for quadrotors, International Micro Air Vehicle Conference and Competition 2014, 58-63
P Lu, L Van Eykeren, E van Kampen, QP Chu, B Yu, Adaptive Hybrid Unscented Kalman Filter for Aircraft Sensor Fault Detection, Isolation and Reconstruction, AIAA guidance, navigation, and control conference 2014, 1-24
Link
B. Yu, Y. Zhang, Y. Yi, Y. Qu, P. Lu. Fault Detection for Partial Loss of Effectiveness Faults of Actuators in a Quadrotor Unmanned Helicopter. Proceedings of the World Congress on Intelligent Control and Automation (WCICA), 2014.
Link
2012
P. Lu, W. Zhang, G. Li, X. Liu. Novel MOPSO and Its Application in the Reliability Optimization of
Large Complex Systems. Application Research of Computers, 2012, 29(6):2153-2155.
Link
P. Lu, W. Zhang, G. Li, X. Liu, X. Li. A Novel MOPSO based on the Invasive Weed Mechanism. Journal of Northwestern Polytechnical University, 2012, 30(2):286-290.
Link