
Our main goal is to increase the autonomy of UAVs by exploring state-of-the-art vision and control techniques. Vision tasks include object detection and tracking whereas control tasks include motion planning, fault-tolerance and obstacle avoidance. Techniques include learning techniques (e.g., reinforcement learning), optimal control and fault-tolerant control.
Smart/Intelligent Robots

Our main goal is to develop smart robots that can help human beings live a better life. We can use reinforcement learning techniques to guide robots to learn aggressive maneuvers. We could also use LLMs to let them better understand and interact with human beings.
Research topics include:
Deep reinforcement learning-based control
Deep reinforcement learning-based navigation
Vision-based navigation and control
Learning to achieve dynamic skills
Visual detection and tracking
Visual Localization, Mapping and Navigation

The main objective is to allow robots to localize itself in any (known or unknown) environments and map the environment for navigation purposes.
Research topics include:
VIsion- or Event-based VO/SLAM
Radar/Lidar-based VO/SLAM
Dynamic and large-scale SLAM
Learning and Control
 The
main goal is to use deep learning and deep reinforcement learning
techniques to help enhance the autonomy and intelligence of robots.
The
main goal is to use deep learning and deep reinforcement learning
techniques to help enhance the autonomy and intelligence of robots.Research topics include:
Deep learning-based object detection and tracking
Scene understanding
Reinforcement learning-based navigation
Continuum/Soft Robotics
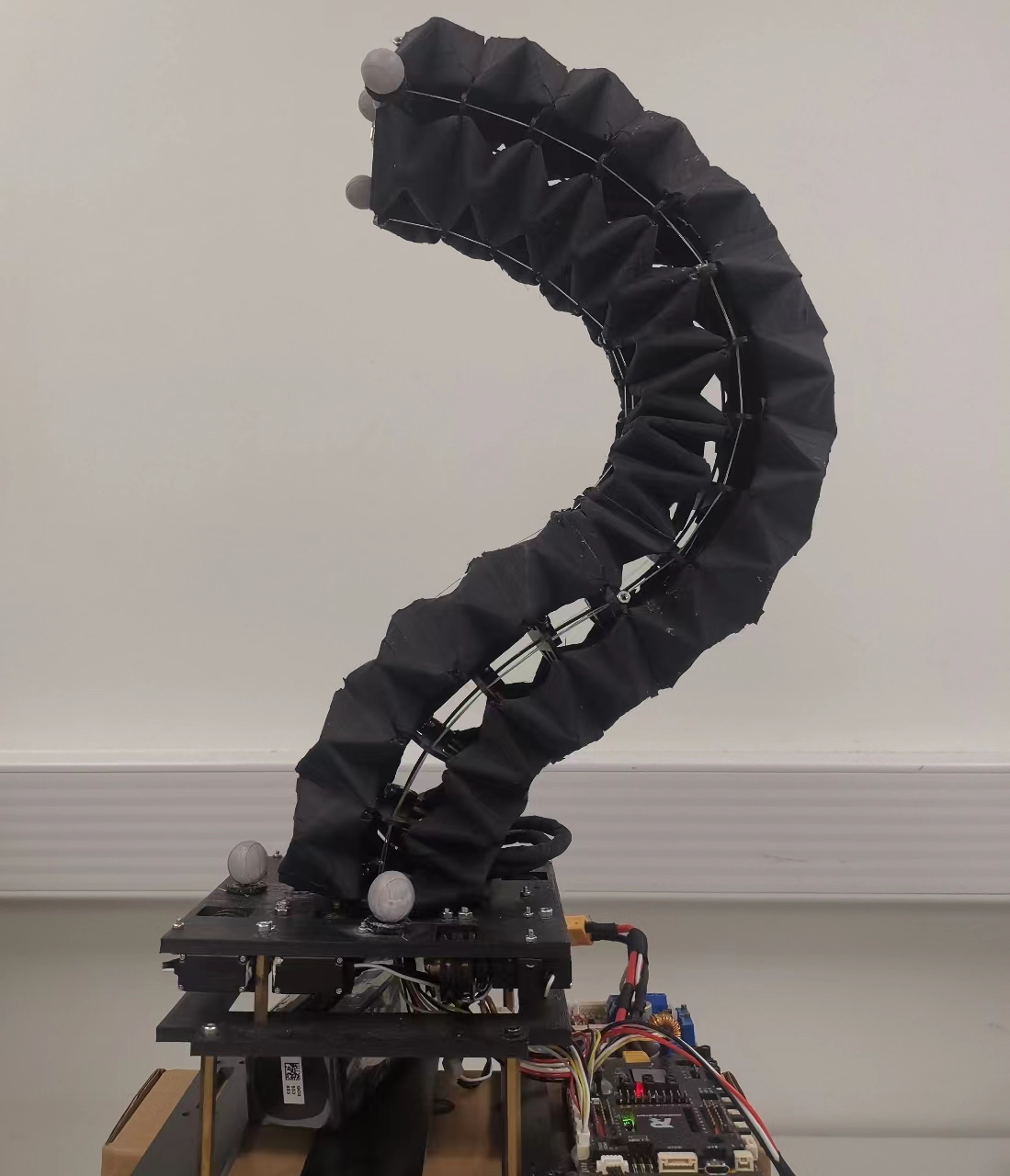
The main goal is to develop navigation and control algorithms for soft/continuum robots. We also aim to enhance the grasping skills of soft/continuum robots, especially in complex scenarios.
Research topics include:
Fast control of continuum robots
RL for continuum robots
Aerial continuum arms
Learning to grasp in complex environments