Aerial Continuum Manipulator - AeCoM
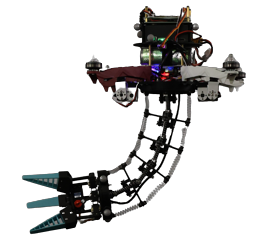
The main goal is to develop intelligent techniques for AeCoM to achieve more dynamic motions and preform more types of grasping tasks.
Example research
Planning and control for soft/continuum arms in complex environments

It is challenging for manipulators to work in complex environments. We aim to develop advanced planning and control algorithms that can allow these continuum manipulators to perform various manipulation tasks in complex real-life environments.
Example research