Vision Odometry/Visual-Inertial/Lidar Odometry
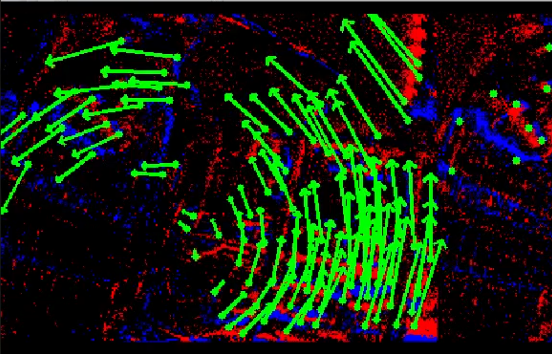
The main goal is to increase the autonomy of UAVs by exploring state-of-the-art vision and control techniques. Vision module detects and tracks objects while the control module executes the command to achieve certain tasks. Topics include navigation in a complex environment, object detection and tracking and obstacle avoidance.
Example research
Simultaneous Localization and Mapping (SLAM)
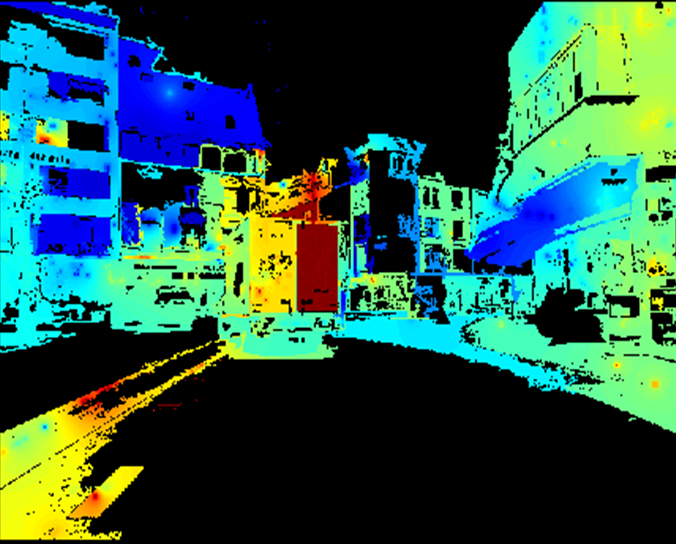
The objective of this research is to increase the safety of the UAVs especially when the UAV is used in outdoor tasks.
The failures of the UAV have to detected in real-time using fault detection techniques and then the failure information is used to reconfigure the controller to maintain the safe flight even in the presence of failures.
Example research